Image Processing¶
1 改变颜色空间¶
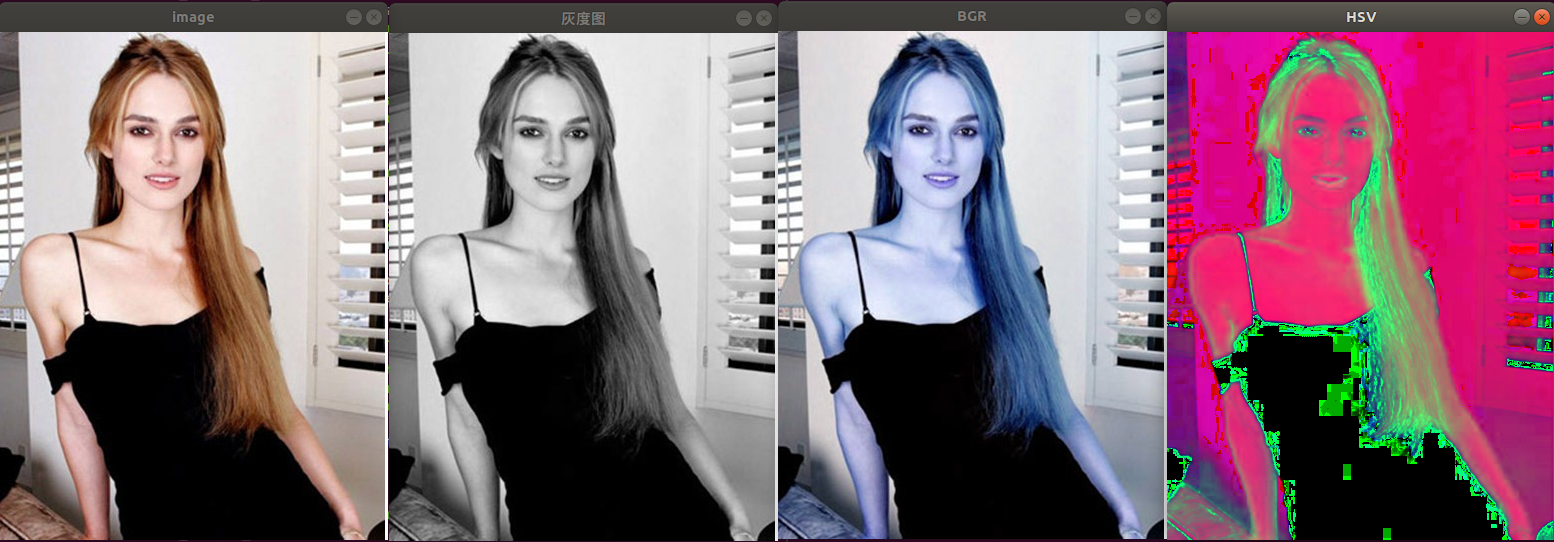
OpenCV中有超过150种颜色空间转换方法。但是我们将研究只有两个最广泛使用的,BGR↔灰色和BGR↔HSV。
Opencv C++ API:
void cvtColor(InputArray src, OutputArray dst, int code, int dstCn = 0);
Note
src 输入图像
dst 输出图像
code 代码颜色空间转换代码
dstCn 目标图像中的信道数; 如果该参数为0,则通道的数量自动从SRC和code派生。
demo调用, 源码
TEST(CvtColor, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0015_gudian.jpg";
CvtColor demo;
demo.RunDemo(filename);
}
函数使用:
void CvtColor::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
// 原图
cv::imshow("image", image); // 展示源图像
// 灰度图
cv::Mat img1, img2, img3;
cv::cvtColor(image, img1, cv::COLOR_RGB2GRAY);
cv::imshow("灰度图", img1);
// HSV
cv::cvtColor(image, img2, cv::COLOR_RGB2HSV);
cv::imshow("HSV", img2);
// BGR
cv::cvtColor(image, img3, cv::COLOR_RGB2BGR);
cv::imshow("BGR", img3);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.cvtColor_test
参考源码:
Note
cvtColor_test.cpp
cvtColor.cpp
cvtColor.h
2 图像的几何变换¶
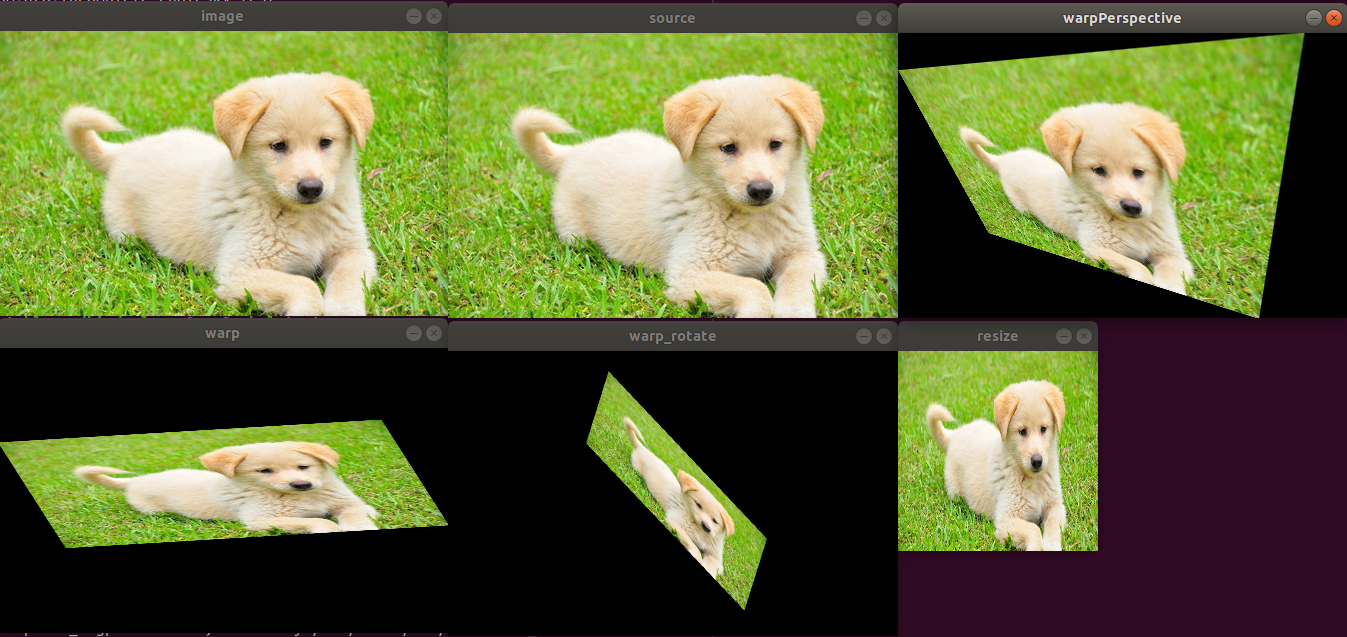
几何变换应用到图像上,如平移、旋转、仿射变换等
OpenCV提供了两个转换函数**cv::warpAffine**和**cv::warpPerspective**,您可以使用它们进行各种转换。 **cv::warpAffine**采用2x3转换矩阵,而**cv::warpPerspective**采用3x3转换矩阵作为输入
缩放
缩放只是调整图像的大小。为此,OpenCV带有一个函数 cv::resize() 。图像的大小可以手动指定, 也可以指定缩放比例。也可使用不同的插值方法。首选的插值方法是 cv::INTER_AREA 用于缩小,cv::INTER_CUBIC (慢) 和 cv::INTER_LINEAR 用于缩放。默认情况下,出于所有调整大小的目的,使用的插值方法为 cv::INTER_LINEAR 。 您可以使用以下方法调整输入图像的大小:
Opencv C++ API:
void cv::resize (InputArray src, OutputArray dst,
Size dsize, double fx = 0, double fy = 0, int interpolation = INTER_LINEAR)
Note
src - 输入图像。
dst - 输出图像;它的大小为 dsize(当它非零时)或从 src.size()、fx 和 fy 计算的大小;dst 的类型与 src 的类型相同。
dsize - 输出图像大小;如果它等于零,则计算为:dsize = Size(round(fx*src.cols), round(fy*src.rows))。dsize 或 fx 和 fy 必须为非零。
fx - 沿水平轴的比例因子;当它等于 0 时,它被计算为(double)dsize.width/src.cols
fy - 沿垂直轴的比例因子;当它等于 0 时,它被计算为(double)dsize.height/src.rows
平移
平移是物体位置的移动。如果您知道在(x,y)方向上的位移,则将其设为 \((t_x, t_y)\) ,你可以创建转换矩阵
Opencv C++ API:
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize,
int flags=INTER_LINEAR, intborderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())
Note
InputArray src:输入的图像
OutputArray dst:输出的图像
InputArray M:透视变换的矩阵
Size dsize:输出图像的大小
int flags=INTER_LINEAR:输出图像的插值方
int borderMode=BORDER_CONSTANT:图像边界的处理方式
const Scalar& borderValue=Scalar():边界的颜色设置,一般默认是0
旋转
Opencv C++ API:
Mat getRotationMatrix2D(Point2f center, double angle, double scale)
Note
Point2f center:表示旋转的中心点
double angle:表示旋转的角度
double scale:图像缩放因子
仿射变换
Opencv C++ API:
Mat getAffineTransform(InputArray src, InputArray dst)
Note
InputArray src:表示输入的三个点
InputArray dstL:表示输出的三个点
透视变换
Opencv C++ API:
void warpPerspective(InputArray src, OutputArray dst, InputArray M,
Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT,
const Scalar& borderValue=Scalar())
Note
InputArray src:输入的图像
OutputArray dst:输出的图像
InputArray M:透视变换的矩阵
Size dsize:输出图像的大小
int flags=INTER_LINEAR:输出图像的插值方法,
int borderMode=BORDER_CONSTANT:图像边界的处理方式
const Scalar& borderValue=Scalar():边界的颜色设置,一般默认是0
demo调用, 源码
TEST(GeometryTransform, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0016_dog.jpg";
GeometryTransform demo;
demo.RunDemo(filename);
}
函数使用:
void GeometryTransform::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
// 原图
cv::imshow("image", image); // 展示源图像
// resize
Resize(image);
// AffineTransform
AffineTransform(image);
// WarpPerspective
WarpPerspective(image);
cv::waitKey(0);
cv::destroyAllWindows();
}
void GeometryTransform::Resize(const cv::Mat& image)
{
cv::Mat dst;
cv::resize(image, dst, cv::Size(200, 200), 0, 0, cv::INTER_CUBIC);
cv::imshow("resize", dst);
cv::waitKey(0);
}
void GeometryTransform::AffineTransform(const cv::Mat& image)
{
cv::Point2f srcTri[3];
cv::Point2f dstTri[3];
cv::Mat rot_mat( 2, 3, CV_32FC1 );
cv::Mat warp_mat( 2, 3, CV_32FC1 );
cv::Mat warp_dst, warp_rotate_dst;
// 设置目标图像的大小和类型与源图像一致
warp_dst = cv::Mat::zeros( image.rows, image.cols, image.type() );
/// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = cv::Point2f( 0,0 );
srcTri[1] = cv::Point2f( image.cols - 1, 0 );
srcTri[2] = cv::Point2f( 0, image.rows - 1 );
dstTri[0] = cv::Point2f( image.cols*0.0, image.rows*0.33 );
dstTri[1] = cv::Point2f( image.cols*0.85, image.rows*0.25 );
dstTri[2] = cv::Point2f( image.cols*0.15, image.rows*0.7 );
/// 求得仿射变换
warp_mat = cv::getAffineTransform( srcTri, dstTri );
/// 对源图像应用上面求得的仿射变换
cv::warpAffine( image, warp_dst, warp_mat, warp_dst.size() );
/** 对图像扭曲后再旋转 */
// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
cv::Point center = cv::Point( warp_dst.cols/2, warp_dst.rows/2 );
double angle = -50.0;
double scale = 0.6;
// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = cv::getRotationMatrix2D( center, angle, scale );
// 旋转已扭曲图像
cv::warpAffine( warp_dst, warp_rotate_dst, rot_mat, warp_dst.size() );
// 显示结果
cv::namedWindow("source", cv::WINDOW_AUTOSIZE );
cv::imshow("source", image );
cv::namedWindow("warp", cv::WINDOW_AUTOSIZE );
cv::imshow("warp", warp_dst );
cv::namedWindow("warp_rotate", cv::WINDOW_AUTOSIZE );
cv::imshow("warp_rotate", warp_rotate_dst );
// 等待用户按任意按键退出程序
cv::waitKey(0);
}
void GeometryTransform::WarpPerspective(const cv::Mat& image)
{
cv::Point2f srcTri[4];
cv::Point2f dstTri[4];
cv::Mat warpPerspective_mat( 3, 3, CV_32FC1 );
cv::Mat warpPerspective_dst;
// Set the dst image the same type and size as src
warpPerspective_dst = cv::Mat::zeros( image.rows, image.cols, image.type() );
/// 设置三组点,求出变换矩阵
srcTri[0] = cv::Point2f( 0,0 );
srcTri[1] = cv::Point2f( image.cols - 1,0 );
srcTri[2] = cv::Point2f( 0, image.rows - 1);
srcTri[3] = cv::Point2f(image.cols - 1, image.rows - 1);
dstTri[0] = cv::Point2f( 0, image.rows * 0.13 );
dstTri[1] = cv::Point2f( image.cols * 0.9, 0 );
dstTri[2] = cv::Point2f( image.cols * 0.2, image.rows * 0.7 );
dstTri[3] = cv::Point2f( image.cols * 0.8, image.rows );
//计算3个二维点对之间的仿射变换矩阵(2行x3列)
warpPerspective_mat = cv::getPerspectiveTransform( srcTri, dstTri );
//应用仿射变换,可以恢复出原图
warpPerspective( image, warpPerspective_dst, warpPerspective_mat, image.size() );
//显示结果
cv::namedWindow("source", cv::WINDOW_AUTOSIZE );
cv::imshow("source", image);
cv::namedWindow("warpPerspective", cv::WINDOW_AUTOSIZE );
cv::imshow("warpPerspective", warpPerspective_dst );
cv::waitKey(0);
}
运行结果
[bin] ./xslam.opencv.image_processing.geometry_transform_test
参考源码:
Note
geometry_transform_test.cpp
geometry_transform.cpp
geometry_transform.h
3 图像阈值¶
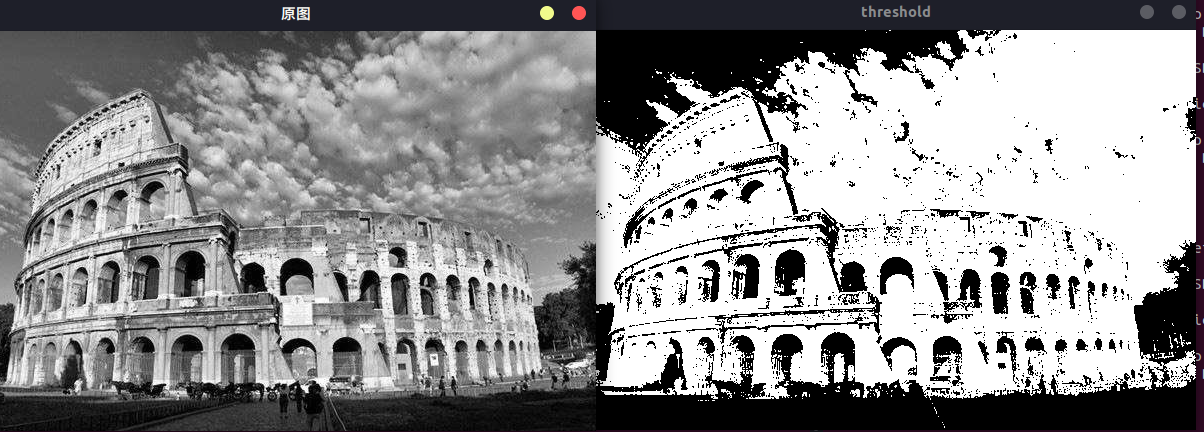
阈值化操作的基本思想是,给定一个输入数组和一个阈值,数组中的每个元素将根据其与阈值之间的大小发生相应的改变。
Opencv C++ API:
double cv::threshold(
cv::InputArray src, // 输入图像
cv::OutputArray dst, // 输出图像
double thresh, // 阈值
double maxValue, // 向上最大值
int thresholdType // 阈值化操作的类型
);
Note
src:原图。可以是多通道,8位深度或者32位深度
dst:结果图像。大小和类型与原图一致
thresh:阈值
maxval:最大阈值。当阈值类型为THRESH_BINARY或THRESH_BINARY_INV时使用
type:阈值类型
demo调用, 源码
TEST(Threshold, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0014_roma.jpg";
Threshold demo;
demo.RunDemo(filename);
}
函数使用:
void Threshold::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename, cv::IMREAD_GRAYSCALE);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
cv::Mat dst;
double thresh = 100;
int maxVal = 255;
cv::threshold(image, dst, thresh, maxVal, cv::THRESH_BINARY);
cv::imshow("threshold", dst);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.threshold_test
参考源码:
Note
threshold_test.cpp
threshold.cpp
threshold.h
4 图像平滑¶
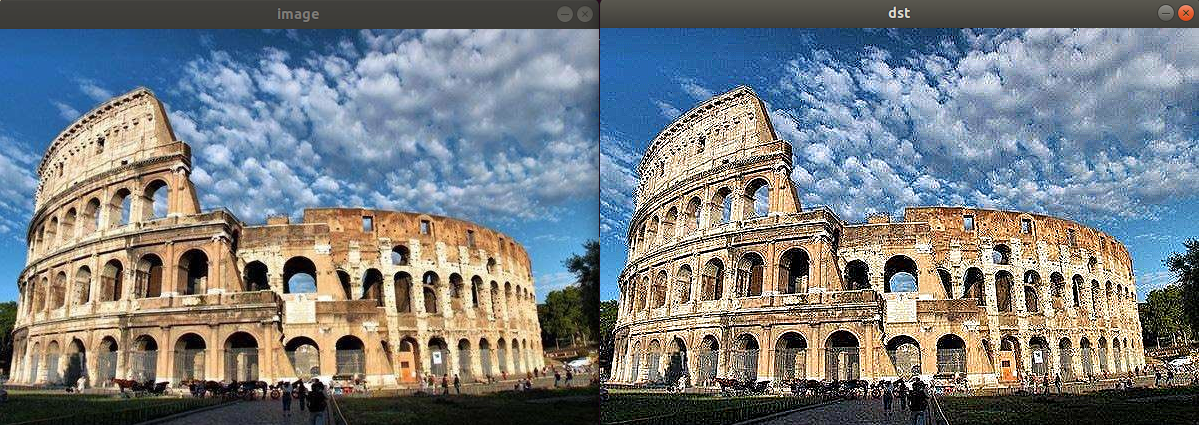
与一维信号一样,还可以使用各种低通滤波器(LPF),高通滤波器(HPF)等对图像进行滤波。 LPF有助于消除噪声,使图像模糊等。HPF滤波器有助于在图像中找到边缘。
OpenCV提供了一个函数 cv.filter2D 来将内核与图像进行卷积。例如,我们将尝试对图像进行平均滤波。 5x5平均滤波器内核如下所示:
操作如下:保持这个内核在一个像素上,将所有低于这个内核的25个像素相加,取其平均值,然后用新的平均值替换中心像素。 它将对图像中的所有像素继续此操作。
Opencv C++ API:
void filter2D(InputArray src, OutputArray dst, int ddepth,
InputArray kernel, Point anchor = Point(-1,-1),
double delta = 0, int borderType = BORDER_DEFAULT );
Note
src: 源图像Mat对象
dst: 目标图像Mat对象
ddepth: 目标图像的深度,一般填-1即可,表示源图像与目标图像深度相同。
kernel: 卷积核,一个单通道浮点型矩阵。如果想在图像不同的通道使用不同的kernel,可以先使用split()函数将图像通道事先分开。
anchor: 内核的基准点,其默认值为(-1,-1)说明位于kernel的中心位置。基准点即kernel中与进行处理的像素点重合的点,不填即默认值。
delta : 在储存目标图像前可选的添加到像素的值,默认值为0,不填就是默认值。
borderType: 像素向外逼近的方法,默认值是BORDER_DEFAULT,即对全部边界进行计算,不填就是默认。
demo调用, 源码
TEST(Filter2D, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0012_parthenon_temple.jpg";
Filter2D demo;
demo.RunDemo(filename);
}
函数使用:
void Filter2D::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("image", image); // 展示源图像
cv::Mat dst;
cv::Mat kernal = (cv::Mat_<char>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0); // 生成卷积核
cv::filter2D(image, dst, -1, kernal);
cv::imshow("dst", dst); // 展示目标图像
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.filter2D_test
参考源码:
Note
filter2D_test.cpp
filter2D.cpp
filter2D.h
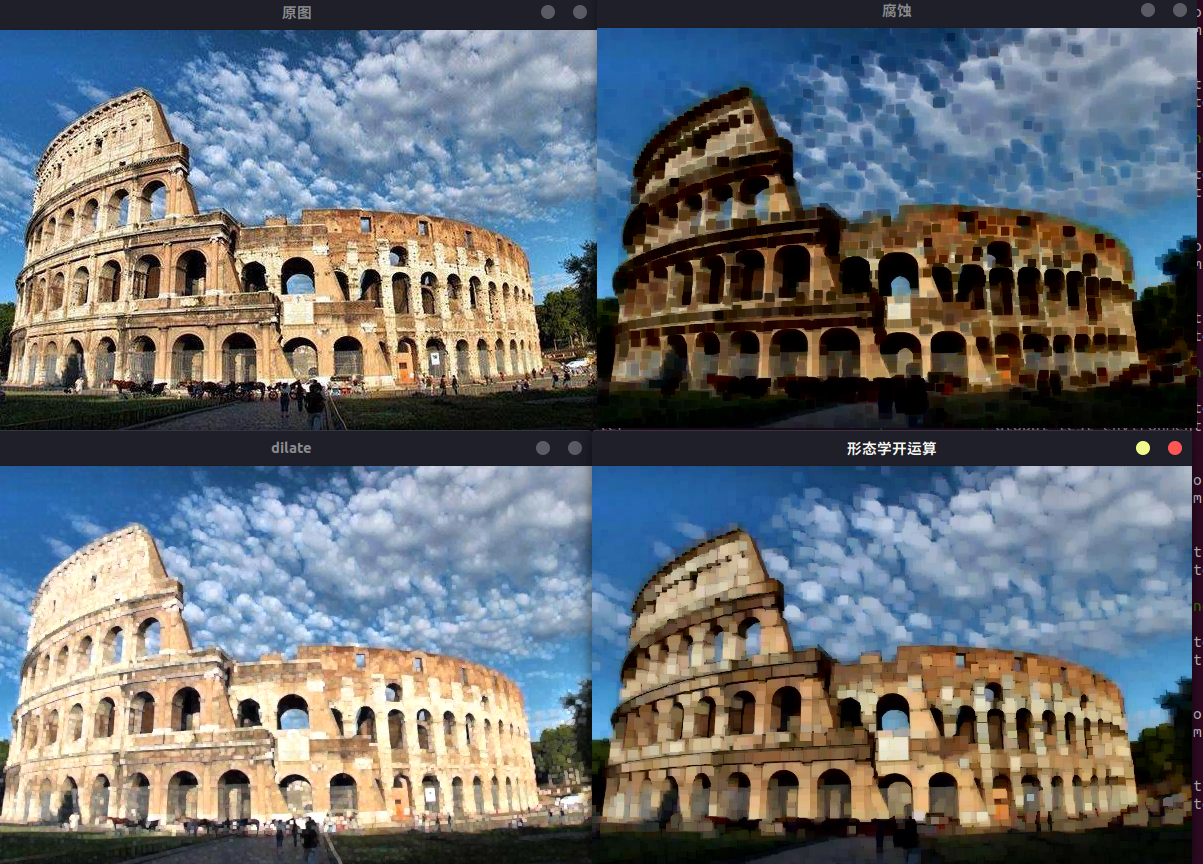
5 形态学转换¶
理论
形态变换是一些基于图像形状的简单操作。通常在二进制图像上执行。它需要两个输入,一个是我们的原始图像, 第二个是决定 操作性质的结构元素 或 内核 。两种基本的形态学算子是侵蚀和膨胀。然后,它的变体形式 (如“打开”,“关闭”,“渐变”等)也开始起作用。
侵蚀
侵蚀的基本思想就像土壤侵蚀一样,它侵蚀前景物体的边界(尽量使前景保持白色)。它是做什么的呢?内核滑动通过图像(在2D卷积中)。 原始图像中的一个像素(无论是1还是0)只有当内核下的所有像素都是1时才被认为是1, 否则它就会被侵蚀(变成0)。
结果是,根据内核的大小,边界附近的所有像素都会被丢弃。因此,前景物体的厚度或大小减小,或只是图像中的白色区域减小。 它有助于去除小的白色噪声(正如我们在颜色空间章节中看到的),分离两个连接的对象等.
Opencv C++ API:
void erode( InputArray src, OutputArray dst, InputArray kernel,
Point anchor = Point(-1,-1), int iterations = 1,
int borderType = BORDER_CONSTANT,
const Scalar& borderValue = morphologyDefaultBorderValue() );
Note
参数 src: 输入图像;通道的数量可以是任意的,但是深度值应该是以下之一: CV_8U, CV_16U, CV_16S, CV_32F or CV_64F.
参数 dst: 和源图像同样大小和类型的输出图像。
参数 kernel: 用于腐蚀的结构元素;如果element=Mat(),是一个3 x 3的矩形结构元素. Kernel 可以通过使用getStructuringElement来创建。
参数 anchor: 素中的锚点的位置,默认是值(-1,-1),也就是说锚点在元素的中心位置。
参数 iterations: 腐蚀的迭代次数。
参数 borderType: 像素外推方法。参见#BorderTypes, BORDER_WRAP不支持。
参数 borderValue: 固定边缘的情况下的边缘值。
参考 dilate, morphologyEx, getStructuringElement
扩张
它与侵蚀正好相反。如果内核下的至少一个像素为“ 1”,则像素元素为“ 1”。 因此,它会增加图像中的白色区域或增加前景对象的大小。通常,在消除噪音的情况下,腐蚀后会膨胀。 因为腐蚀会消除白噪声,但也会缩小物体。因此,我们对其进行了扩展。由于噪音消失了,它们不会回来, 但是我们的目标区域增加了。在连接对象的损坏部分时也很有用。
Opencv C++ API:
void dilate( InputArray src, OutputArray dst, InputArray kernel,
Point anchor = Point(-1,-1), int iterations = 1,
int borderType = BORDER_CONSTANT,
const Scalar& borderValue = morphologyDefaultBorderValue() );
Note
InputArray类型的src,输入图像,如Mat类型。
OutputArray类型的dst,输出图像。
InputArray类型的kernel,膨胀操作的内核也就是上面所说的蒙版。为NULL时,默认表示以参考点为中心3*3的核。一般配合函数getStructuringElement使用,该函数可以构造一个指定形状和尺寸的蒙版。
Point类型的anchor,锚点。默认值(-1,-1),表示位于单位中心,一般不用。
nt类型的iterations,迭代使用的次数,默认值为1。
int类型的borderType,推断图像外部像素的边界模式,我OpenCV版本的默认值为BORDER_CONSTANT。如果图像边界需要扩展,则不同的模式下所扩展的像素,其生成原则不同。
const Scalar&类型的borderValue,当边界为常数时的边界值,默认值为morphologyDefaultBorderValue()。
开运算
开放只是 侵蚀然后扩张 的另一个名称。如上文所述,它对于消除噪音很有用。在这里,我们使用函数 cv::morphologyEx()
Opencv C++ API:
void morphologyEx(InputArray src, OutputArray dst, int op, InputArray kernel,
Point anchor=Point(-1,-1), int iterations=1, int borderType=BORDER_CONSTANT,
const Scalar& borderValue=morphologyDefaultBorderValue())
Note
src:源图像
dst:目标图像。
op:表示形态学运算的类型,可以是如下之一的标识符:
MORPH_OPEN – 开运算(Opening operation)
MORPH_CLOSE – 闭运算(Closing operation)
MORPH_GRADIENT -形态学梯度(Morphological gradient)
MORPH_TOPHAT - “顶帽”(“Top hat”)
MORPH_BLACKHAT - “黑帽”(“Black hat“)
kernel:形态学运算的内核
anchor:锚的位置,其有默认值(-1,-1),表示锚位于中心。
iterations:迭代使用函数的次数,默认值为1。
borderType:用于推断图像外部像素的某种边界模式。注意它有默认值BORDER_CONSTANT。
borderValue:当边界为常数时的边界值,有默认值morphologyDefaultBorderValue(),一般我们不用去管他。
闭运算
闭运算与开运算相反,先扩张然后再侵蚀。在关闭前景对象内部的小孔或对象上的小黑点时很有用。
形态学梯度
这是图像扩张和侵蚀之间的区别。 结果将看起来像对象的轮廓。
顶帽
输入图像和图像开运算之差
黑帽
输入图像和图像闭运算之差
demo调用, 源码
TEST(Morphology, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0014_roma.jpg";
Morphology demo;
demo.RunDemo(filename);
}
函数使用:
void Morphology::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
// erode
cv::Mat erode;
//自定义核
cv::Mat element = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(8, 8));
cv::imshow("原图", image);
cv::erode(image, erode, element);
cv::imshow("腐蚀", erode);
// dilate
cv::Mat dilate_element = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3));
cv::Mat dilate;
cv::dilate(image, dilate, dilate_element);
imshow("dilate", dilate);
// morphologyEx
cv::Mat morphologyEx;
//定义核
cv::Mat morphologyEx_element(7, 7, CV_8U, cv::Scalar(1));
//进行形态学开运算操作
cv::morphologyEx(image, morphologyEx, cv::MORPH_OPEN, morphologyEx_element);
imshow("形态学开运算", morphologyEx);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.morphology_test
参考源码:
Note
morphology_test.cpp
morphology.cpp
morphology.h
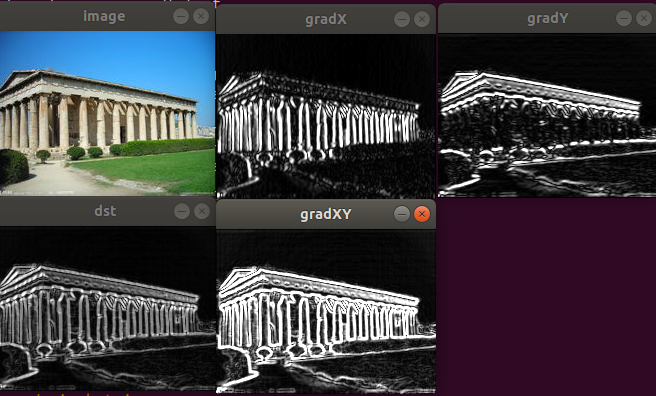
6 图像梯度¶
OpenCV提供三种类型的梯度滤波器或高通滤波器, 即Sobel, Scharr和Laplacian。我们将看到他们每一种
1. Sobel 和 Scharr 算子
Sobel算子是高斯平滑加微分运算的联合运算, 因此它更抗噪声。逆可以指定要采用的导数方向, 垂直或水平(分别通过参数yorder和xorder)。逆还可以通过参数ksize指定内核的大小。 如果ksize = -1,则使用3x3 Scharr滤波器,比3x3 Sobel滤波器具有更好的结果。请参阅文档以了解所使用的内核。
2. Laplacian 算子
它计算了由关系 \(\Delta{src} = \frac{\partial^2{src}}{\partial{x^2}} + \frac{\partial^2{src}}{\partial{y^2}}\) 给出的图像的拉普拉斯图,它是每一阶导数通过Sobel算子计算。如果ksize = 1,然后使用以下内核用于过滤:
Opencv C++ API:
Sobel算子
void Sobel( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize = 3,
double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT );
Note
src表示输入的灰度图像
dst表示输出的梯度;
ddepth表示输出梯度的数据类型,必须大于输入的图像数据类型,关系如下图所示:
dx=1, dy=0表示对x方向计算梯度;
dx=0, dy=1表示对y方向计算梯度;
Scharr算子
void Scharr( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, double scale = 1, double delta = 0,
int borderType = BORDER_DEFAULT );
Note
参数与Sobel算子基本一致;
但是不需要设置核的大小,因为Scharr默认就是3;
demo调用, 源码
TEST(Gradient, Sobel)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0012_graient_parthenon_temple.jpg";
Gradient demo;
demo.RunDemo(filename);
}
函数使用:
void Gradient::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::namedWindow("image", cv::WINDOW_AUTOSIZE);
cv::imshow("image", image);
// 1. 高斯模糊
cv::Mat srcBlur;
cv::GaussianBlur(image, srcBlur, cv::Size(3, 3), 0, 0);
// 2. 转灰度
cv::Mat srcGray;
cvtColor(srcBlur, srcGray, cv::COLOR_BGR2GRAY);
// 3. 求方向梯度
cv::Mat gradX, gradY;
cv::Sobel(srcGray, gradX, CV_16S, 1, 0, 3);
cv::Sobel(srcGray, gradY, CV_16S, 0, 1, 3);
cv::convertScaleAbs(gradX, gradX); // calculates absolute values, and converts the result to 8-bit.
cv::convertScaleAbs(gradY, gradY);
cv::namedWindow("gradY", cv::WINDOW_AUTOSIZE);
cv::imshow("gradX", gradX);
cv::namedWindow("gradY", cv::WINDOW_AUTOSIZE);
cv::imshow("gradY", gradY);
printf("type: %d, %d", gradX.type(), gradY.type());
// 4. 图像混合
cv::Mat dst;
cv::addWeighted(gradX, 0.5, gradY, 0.5, 0, dst);
cv::namedWindow("dst", cv::WINDOW_AUTOSIZE);
cv::imshow("dst", dst);
// 4.1 void Gradient::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::namedWindow("image", cv::WINDOW_AUTOSIZE);
cv::imshow("image", image);
// 1. 高斯模糊
cv::Mat srcBlur;
cv::GaussianBlur(image, srcBlur, cv::Size(3, 3), 0, 0);
// 2. 转灰度
cv::Mat srcGray;
cvtColor(srcBlur, srcGray, cv::COLOR_BGR2GRAY);
// 3. 求方向梯度
cv::Mat gradX, gradY;
cv::Sobel(srcGray, gradX, CV_16S, 1, 0, 3);
cv::Sobel(srcGray, gradY, CV_16S, 0, 1, 3);
cv::convertScaleAbs(gradX, gradX); // calculates absolute values, and converts the result to 8-bit.
cv::convertScaleAbs(gradY, gradY);
cv::namedWindow("gradY", cv::WINDOW_AUTOSIZE);
cv::imshow("gradX", gradX);
cv::namedWindow("gradY", cv::WINDOW_AUTOSIZE);
cv::imshow("gradY", gradY);
printf("type: %d, %d", gradX.type(), gradY.type());
// 4. 图像混合
cv::Mat dst;
cv::addWeighted(gradX, 0.5, gradY, 0.5, 0, dst);
cv::namedWindow("dst", cv::WINDOW_AUTOSIZE);
cv::imshow("dst", dst);
// 4.1
cv::Mat gradXY = cv::Mat(gradX.size(), gradX.type());
for (int row = 0; row < gradX.rows; row++)
{
for (int col = 0; col < gradX.cols; col++)
{
int gX = gradX.at<uchar>(row, col);
int gY = gradY.at<uchar>(row, col);
gradXY.at<uchar>(row, col) = cv::saturate_cast<uchar>(gX + gY);
}
}
cv::namedWindow("gradXY", cv::WINDOW_AUTOSIZE);
cv::imshow("gradXY", gradXY);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.image_gradient_test
参考源码:
Note
image_gradient_test.cpp
image_gradient.cpp
image_gradient.h
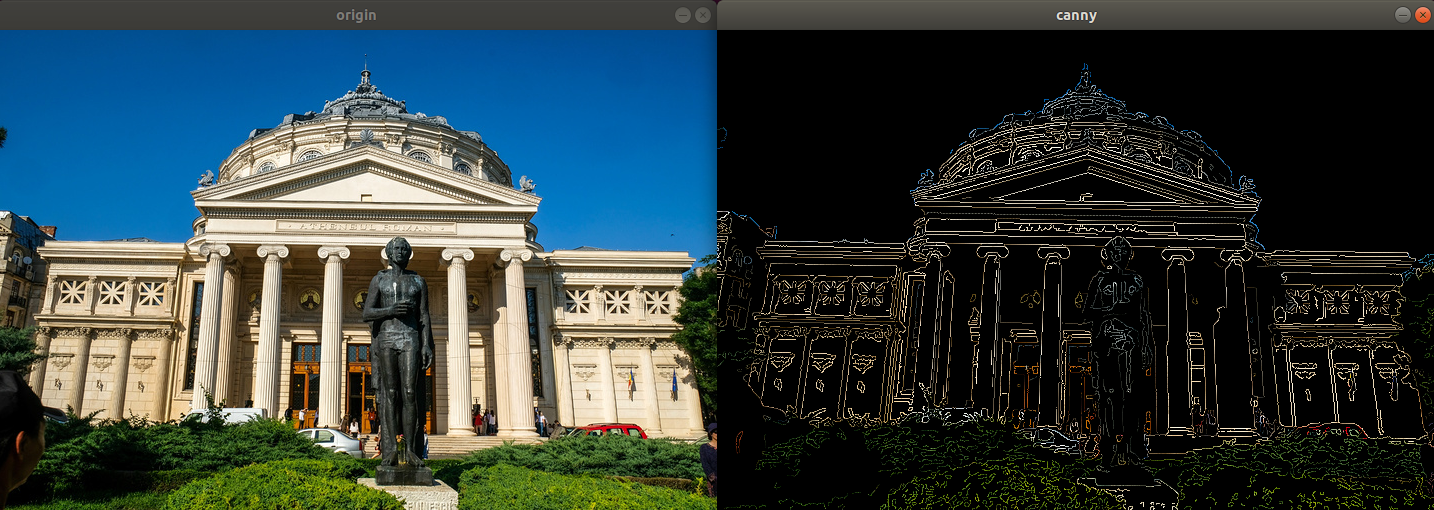
7 Canny边缘检测¶
由于边缘检测容易受到图像中噪声的影响, 因此第一步是使用5x5高斯滤波器消除图像中的噪声。
查找图像的强度梯度
然后使用Sobel核在水平和垂直方向上对平滑的图像进行滤波, 以在水平方向(Gx)和垂直方向(Gy)上获得一阶导数。 从这两张图片中,我们可以找到每个像素的边缘渐变和方向,如下所示:
渐变方向始终垂直于边缘。将其舍入为代表垂直,水平和两个对角线方向的四个角度之一。
Opencv C++ API:
void Canny(InputArray image, OutputArray edges,
double threshold1, double threshold2, int apertureSize=3, bool L2gradient=false)
Note
image: InputArray类型的image, 输入图像, Mat对象节课, 需为单通道8位图像。
edges: OutputArray类型的edges, 输出的边缘图,需要和输入图像有相同的尺寸和类型。
threshold1: double类型的threshold1, 第一个滞后性阈值。
threshold2: double类型的threshold2, 第二个滞后性阈值。
apertureSize: int类型的apertureSize, 表示算子的孔径的大小, 默认值时3.
L2gradient: bool类型的L2gradient, 一个计算图像梯度复制的标识, 默认false。
demo调用, 源码
TEST(Canny, shape)
{
LOG(INFO) << "Run Canny demos ...";
// OpenCV
std::string filename = GetOpenCVDatasetDirectory() + "/0011_canny.jpg";
Canny demo;
demo.RunDemo(filename);
}
函数使用:
void Canny::RunDemo(const std::string& filename)
{
// , grayImage;
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::Mat grayImage;
cv::Mat srcImage1 = image.clone();
cv::cvtColor(image, grayImage, cv::COLOR_BGR2GRAY);
cv::Mat dstImage, edge;
cv::blur(grayImage, grayImage, cv::Size(3,3));
cv::Canny(grayImage, edge, 150, 100, 3);
dstImage.create(srcImage1.size(), srcImage1.type());
srcImage1.copyTo(dstImage, edge);
cv::imshow("origin", image);
cv::imshow("canny", dstImage);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.canny_test
参考源码:
Note
canny_test.cpp
canny.cpp
canny.h
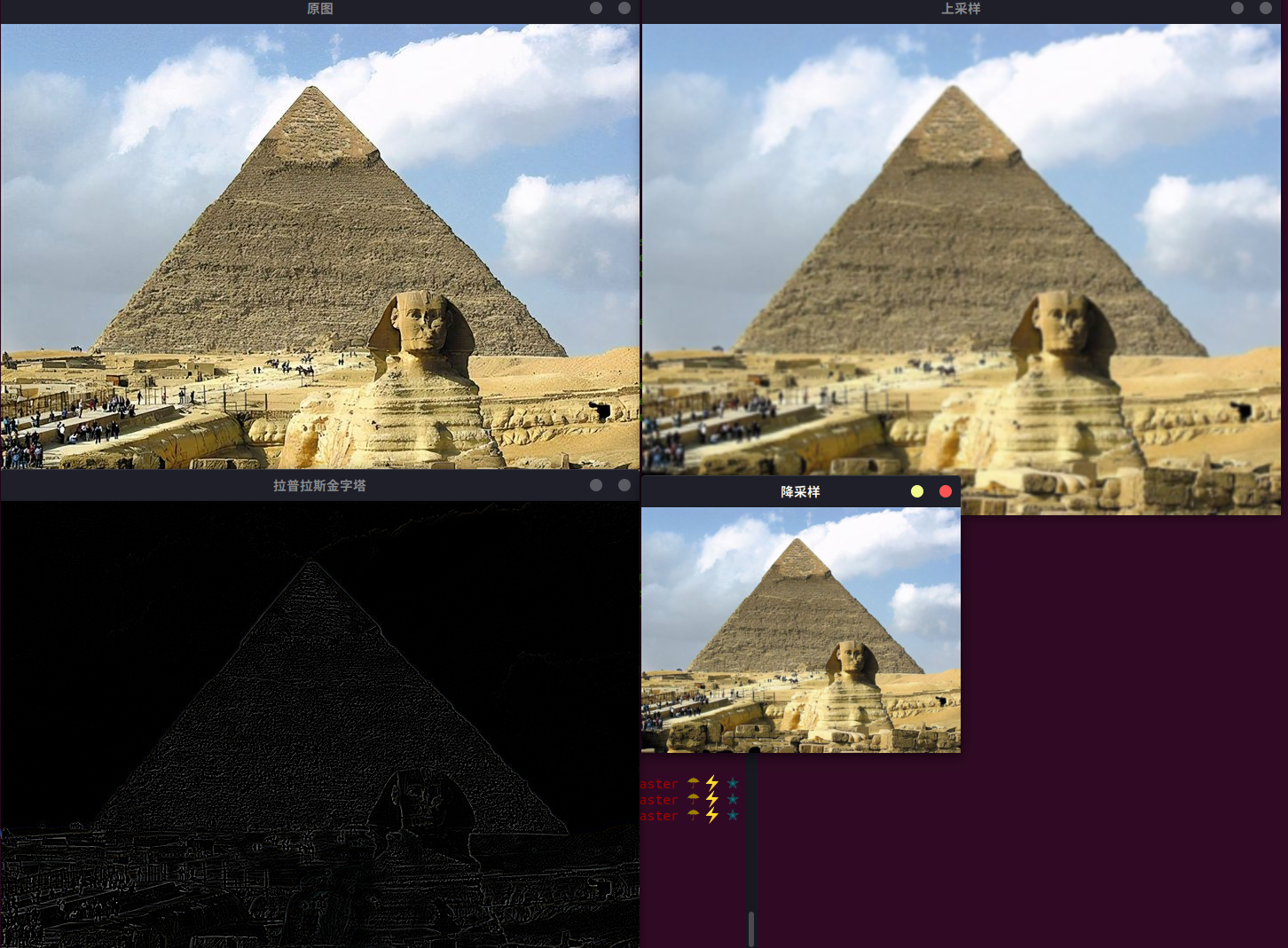
8 图像金字塔¶
Opencv C++ API:
void pyrDown(InputArray src, OutputArray dst, const Size& dstsize=Size());
void pyrUp(InputArray src, OutputArray dst, const Size& dstsize=Size());
Note
先对图像进行高斯平滑,然后再进行降采样(将图像尺寸行和列方向缩减一半)
先对图像进行升采样(将图像尺寸行和列方向增大一倍),然后再进行高斯平滑;
demo调用, 源码
TEST(Threshold, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0017_pyr.jpg";
PyrDownUp demo;
demo.RunDemo(filename);
}
函数使用:
void PyrDownUp::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
cv::Mat out;
cv::pyrDown(image, out);
cv::imshow("降采样", out);
cv::pyrUp(out, out);
cv::imshow("上采样", out);
cv::subtract(image, out, out);
cv::imshow("拉普拉斯金字塔", out);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.pyr_down_up_test
参考源码:
Note
pyr_down_up_test.cpp
pyr_down_up.cpp
pyr_down_up.h
9 轮廓¶
Opencv C++ API:
void convexHull(InputArray points, OutputArray hull, bool clockwise=false, bool returnPoints=true);
Note
第一个参数:输入的点集,可以是Mat型矩阵,也可以是std::vector<point>的点容器
第二个参数:可以为vector<int>,此时返回的是每个凸包点在原轮廓点容器中的索引,也可以为vector<Point>,此时存放的是凸包点的位置,即点(x,y)坐标。
第三个参数:bool变量,表示输出的凸包是顺时针方向还是逆时针方向,true是顺时针方向,false为逆时针方向,默认值是true,即顺时针方向输出凸包。
第四个参数:bool型变量returnPoints,表示第二个参数的输出类型,默认为true,即返回凸包的各个点,设置为false时,表示返回凸包各个点的索引。当第二个参数类型为std::vector,则该标志位被忽略,就是以第二个参数为准,即为vector<int>,此时返回的是每个凸包点在原轮廓点容器中的索引,为vector<Point>时,此时存放的是凸包点的位置,即点(x,y)坐标。
demo调用, 源码
TEST(ConvexHull, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0022_convex_hull.jpeg";
ConvexHull demo;
demo.RunDemo(filename);
}
函数使用:
cv::RNG rng(12345);
cv::Mat src_gray;
int thresh = 100;
void ConvexHull::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename, 0);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
cvtColor( image, src_gray, cv::COLOR_BGR2GRAY );
cv::blur( src_gray, src_gray, cv::Size(3,3) );
const char* source_window = "Source";
const int max_thresh = 255;
// cv::createTrackbar( "Canny thresh:", source_window, &thresh, max_thresh,
// std::bind(&ConvexHull::ThreshCallback, std::placeholders::_1, std::placeholders::_2));
cv::createTrackbar( "Canny thresh:", source_window, &thresh, max_thresh, ThreshCallback);
ThreshCallback( 0, 0 );
while (true) {
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
void ThreshCallback(int, void*)
{
cv::Mat canny_output;
cv::Canny( src_gray, canny_output, thresh, thresh*2 );
std::vector<std::vector<cv::Point>> contours;
cv::findContours( canny_output, contours, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE );
std::vector<std::vector<cv::Point> >hull( contours.size() );
for( size_t i = 0; i < contours.size(); i++ )
{
cv::convexHull( contours[i], hull[i] );
}
cv::Mat drawing =cv:: Mat::zeros( canny_output.size(), CV_8UC3 );
for( size_t i = 0; i< contours.size(); i++ )
{
cv::Scalar color = cv::Scalar( rng.uniform(0, 256), rng.uniform(0,256), rng.uniform(0,256) );
cv::drawContours( drawing, contours, (int)i, color );
cv::drawContours( drawing, hull, (int)i, color );
}
cv::imshow( "Hull demo", drawing );
}
运行结果
[bin] ./xslam.opencv.image_processing.convexHull_test
参考源码:
Note
convexHull_test.cpp
convexHull.cpp
convexHull.h
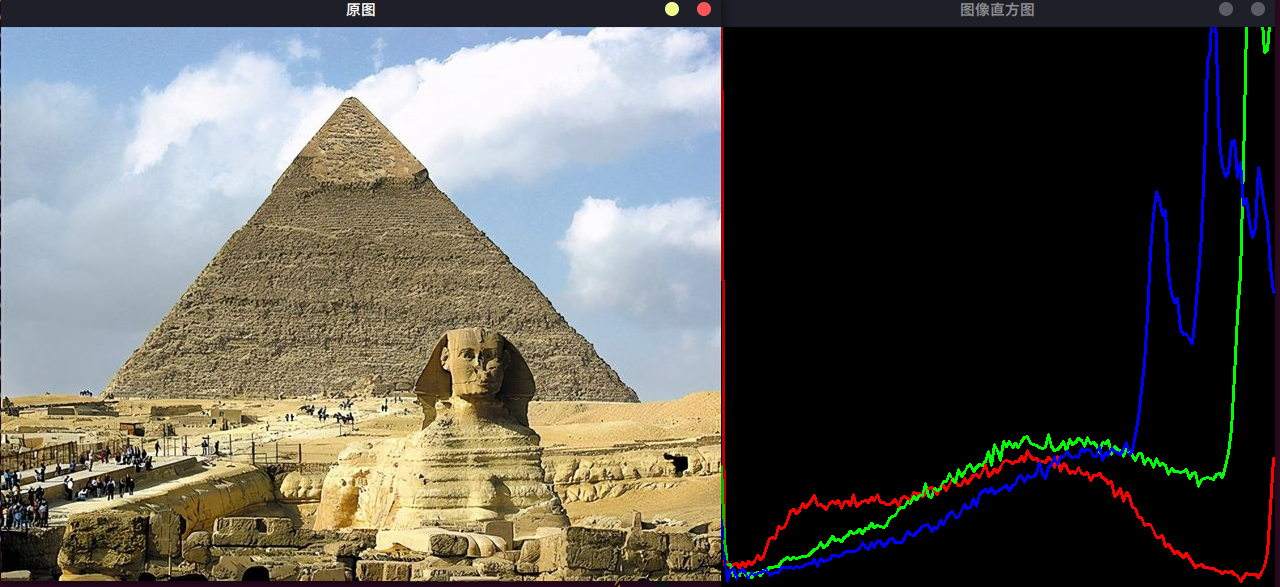
10 直方图¶
Opencv C++ API:
void cv::calcHist(const Mat *images,
int nimages,
const int *channels,
InputArray mask,
OutputArray hist,
int dims,
const int *histSize,
const float **ranges,
bool uniform = true,
bool accumulate = false
)
Note
images: 输入的图像或数组,它们的深度必须为CV_8U, CV_16U或CV_32F中的一类,尺寸必须相同。
nimages: 输入数组个数,也就是第一个参数中存放了几张图像,有几个原数组。
channels: 需要统计的通道dim,第一个数组通道从0到image[0].channels()-1,第二个数组从image[0].channels()到images[0].channels()+images[1].channels()-1,以后的数组以此类推
mask: 可选的操作掩码。如果此掩码不为空,那么它必须为8位并且尺寸要和输入图像images[i]一致。非零掩码用于标记出统计直方图的数组元素数据。
hist: 输出的目标直方图,一个二维数组
dims: 需要计算直方图的维度,必须是正数且并不大于CV_MAX_DIMS(在opencv中等于32)
histSize: 每个维度的直方图尺寸的数组
ranges: 每个维度中bin的取值范围
uniform: 直方图是否均匀的标识符,有默认值true
accumulate: 累积标识符,有默认值false,若为true,直方图再分配阶段不会清零。此功能主要是允许从多个阵列中计算单个直方图或者用于再特定的时间更新直方图.
在计算图像直方图的时候一般配合minMaxLoc()和normalize()函数,minMaxLoc()函数是用于寻找最值的函数
void cv::minMaxLoc(InputArray src,
double * minVal,
double * maxVal = 0,
Point * minLoc = 0,
Point * maxLoc = 0,
InputArray mask = noArray()
)
Note
src: 输入的单通道数组
minVal: double类型指针,用于返回最小值的指针,如果不需要返回则设置为NULL
maxVal: double类型的指针,用于返回最大值指针,如果不需要返回则设置为NULL
minLoc: 返回最小值位置指针(2D的情况下),如果不需要则设置为NULL
maxLoc: 返回最大位置指针(2D情况下),如果不需要则设置为NULL
mask: 可选掩模板。
normalize()函数的作用是将一个数组的值归一化到指定的范围
void cv::normalize(InputArray src,
InputOutputArray dst,
double alpha = 1,
double beta = 0,
int norm_type = NORM_L2,
int dtype = -1,
InputArray mask = noArray()
)
Note
src: 输入数组
dst: 输出数组,与src有相同的尺寸
alpha: 将数组归一化范围的最大值,有默认值1
beta: 归一化的最小值,有默认值0
norm_type: 归一化方式,可以查看NormTypes()函数查看详细信息,有默认值NORM_L2
dtype: 当该值取负数时,输出数组与src有相同类型,否则,与src有相同的通道并且深度为CV_MAT_DEPTH(dtype)
mask: 可选的掩膜版
demo调用, 源码
TEST(CalcHist, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0017_pyr.jpg";
CalcHist demo;
demo.RunDemo(filename);
}
函数使用:
void CalcHist::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
//分割成三通道图像
std::vector<cv::Mat> channels;
cv::split(image, channels);
//设定bin数目
int histBinNum = 255;
//设定取值范围
float range[] = {0, 255};
const float* histRange = {range};
bool uniform = true;
bool accumulate = false;
//声明三个通道的hist数组
cv::Mat red_hist, green_hist, blue_hist;
//计算直方图
cv::calcHist(&channels[0], 1, 0, Mat(), red_hist, 1, &histBinNum, &histRange, uniform, accumulate);
cv::calcHist(&channels[1], 1, 0, Mat(), green_hist, 1, &histBinNum, &histRange, uniform, accumulate);
cv::calcHist(&channels[2], 1, 0, Mat(), blue_hist, 1, &histBinNum, &histRange, uniform, accumulate);
//创建直方图窗口
int hist_w = 400;
int hist_h = 400;
int bin_w = cvRound((double)image.cols/histBinNum);
cv::Mat histImage(image.cols, image.rows, CV_8UC3, Scalar(0, 0, 0));
//将直方图归一化到范围[0, histImage.rows]
cv::normalize(red_hist, red_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
cv::normalize(green_hist, green_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
cv::normalize(blue_hist, blue_hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());
//循环绘制直方图
for(int i = 1; i < histBinNum; i++)
{
cv::line(histImage, Point(bin_w*(i-1), image.rows - cvRound(red_hist.at<float>(i-1))),
Point(bin_w*(i), image.rows - cvRound(red_hist.at<float>(i))), Scalar(0, 0, 255), 2, 8, 0);
cv::line(histImage, Point(bin_w*(i-1), image.rows - cvRound(green_hist.at<float>(i-1))),
Point(bin_w*(i), image.rows - cvRound(green_hist.at<float>(i))), Scalar(0, 255, 0), 2, 8, 0);
cv::line(histImage, Point(bin_w*(i-1), image.rows - cvRound(blue_hist.at<float>(i-1))),
Point(bin_w*(i), image.rows - cvRound(blue_hist.at<float>(i))), Scalar(255, 0, 0), 2, 8, 0);
}
cv::namedWindow("图像直方图", cv::WINDOW_AUTOSIZE);
cv::imshow("图像直方图", histImage);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.calcHist_test
参考源码:
Note
calcHist_test.cpp
calcHist.cpp
calcHist.h
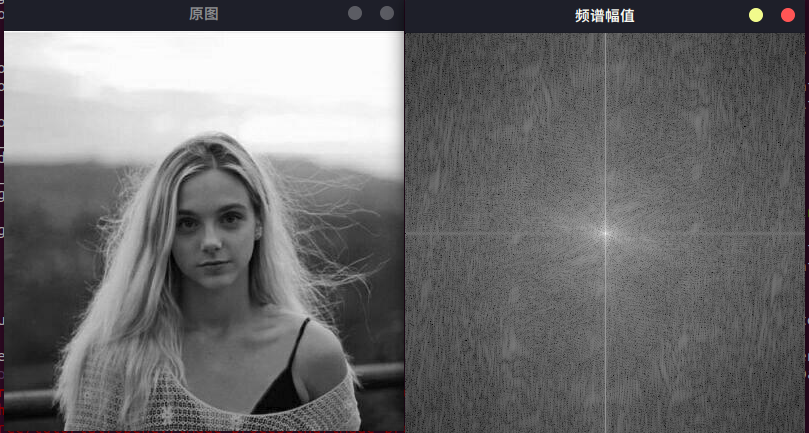
11 傅里叶变换¶
Opencv C++ API:
dft函数的作用是对一维或二维浮点数数组进行正向或反向离散傅里叶变换
void dft(InputArray src, OutputArray dst, int flags=0, int nonzeroRows=0);
Note
第一个参数,InputArray类型的src。输入矩阵,可以是实数或虚数。
第二个参数,OutputArray类型的dst,函数调用后的运算结果在这里,其尺寸和类型取决于标识符,也就是第三个参数flags
第三个参数,int类型的flags,转换的标识符,有默认值0,取值可以为下表。
第四个参数,int类型的nonzeroRows,默认值是0。
返回给定向量尺寸经过DFT变换后结果的最优尺寸大小。
int getOptimalDFTSize(int vecsize);
Note
int vecsize: 输入向量尺寸大小(vector size)
这个函数不能直接用于DCT(离散余弦变换)最优尺寸的估计,可以通过getOptimalDFTSize((vecsize+1)/2)*2得到
void magnitude(InputArray x, InputArray y, OutputArray magnitude);
Note
InputArray x: 浮点型数组的x坐标矢量,也就是实部
InputArray y: 浮点型数组的y坐标矢量,必须和x尺寸相同
OutputArray magnitude: 与x类型和尺寸相同的输出数组
demo调用, 源码
TEST(FFT, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0021_fft.jpg";
FFT demo;
demo.RunDemo(filename);
}
函数使用:
void FFT::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
// 将输入图像扩展到最佳尺寸,边界用0填充
// 离散傅里叶变换的运行速度与图像的大小有很大的关系,当图像的尺寸使2,3,5的整数倍时,计算速度最快
// 为了达到快速计算的目的,经常通过添加新的边缘像素的方法获取最佳图像尺寸
// 函数getOptimalDFTSize()用于返回最佳尺寸,copyMakeBorder()用于填充边缘像素
int m = cv::getOptimalDFTSize(image.rows);
int n = cv::getOptimalDFTSize(image.cols);
cv::Mat padded;
cv::copyMakeBorder(image, padded, 0, m - image.rows, 0, n - image.cols, cv::BORDER_CONSTANT, cv::Scalar::all(0));
// 为傅立叶变换的结果分配存储空间
// 将plannes数组组合成一个多通道的数组,两个同搭配,分别保存实部和虚部
// 傅里叶变换的结果使复数,这就是说对于每个图像原像素值,会有两个图像值
// 此外,频域值范围远远超过图象值范围,因此至少将频域储存在float中
// 所以我们将输入图像转换成浮点型,并且多加一个额外通道来存储复数部分
cv::Mat planes[] = {cv::Mat_<float>(padded), cv::Mat::zeros(padded.size(), CV_32F)};
cv::Mat complexI;
cv::merge(planes, 2, complexI);
// 进行离散傅立叶变换
cv::dft(complexI, complexI);
// 将复数转化为幅值,保存在planes[0]
cv::split(complexI, planes); // 将多通道分为几个单通道
cv::magnitude(planes[0], planes[1], planes[0]);
cv::Mat magnitudeImage = planes[0];
// 傅里叶变换的幅值达到不适合在屏幕上显示,因此我们用对数尺度来替换线性尺度
// 进行对数尺度logarithmic scale缩放
magnitudeImage += cv::Scalar::all(1); // 所有的像素都加1
log(magnitudeImage, magnitudeImage); // 求自然对数
// 剪切和重分布幅度图像限
// 如果有奇数行或奇数列,进行频谱裁剪
magnitudeImage = magnitudeImage(cv::Rect(0, 0, magnitudeImage.cols & -2, magnitudeImage.rows & -2));
// ---- -------- 下面的是为了显示结果 ---------------
// 一分为四,左上与右下交换,右上与左下交换
// 重新排列傅里叶图像中的象限,使原点位于图像中心
int cx = magnitudeImage.cols / 2;
int cy = magnitudeImage.rows / 2;
cv::Mat q0(magnitudeImage, cv::Rect(0, 0, cx, cy)); // ROI区域的左上
cv::Mat q1(magnitudeImage, cv::Rect(cx, 0, cx, cy)); // ROI区域的右上
cv::Mat q2(magnitudeImage, cv::Rect(0, cy, cx, cy)); // ROI区域的左下
cv::Mat q3(magnitudeImage, cv::Rect(cx, cy, cx, cy)); // ROI区域的右下
// 交换象限(左上与右下进行交换)
cv::Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
// 交换象限(右上与左下进行交换)
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
// 归一化
cv::normalize(magnitudeImage, magnitudeImage, 0, 1, cv::NORM_MINMAX);
// 显示效果图
cv::imshow("频谱幅值", magnitudeImage);
while (true) {
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.fft_test
参考源码:
Note
fft_test.cpp
fft.cpp
fft.h
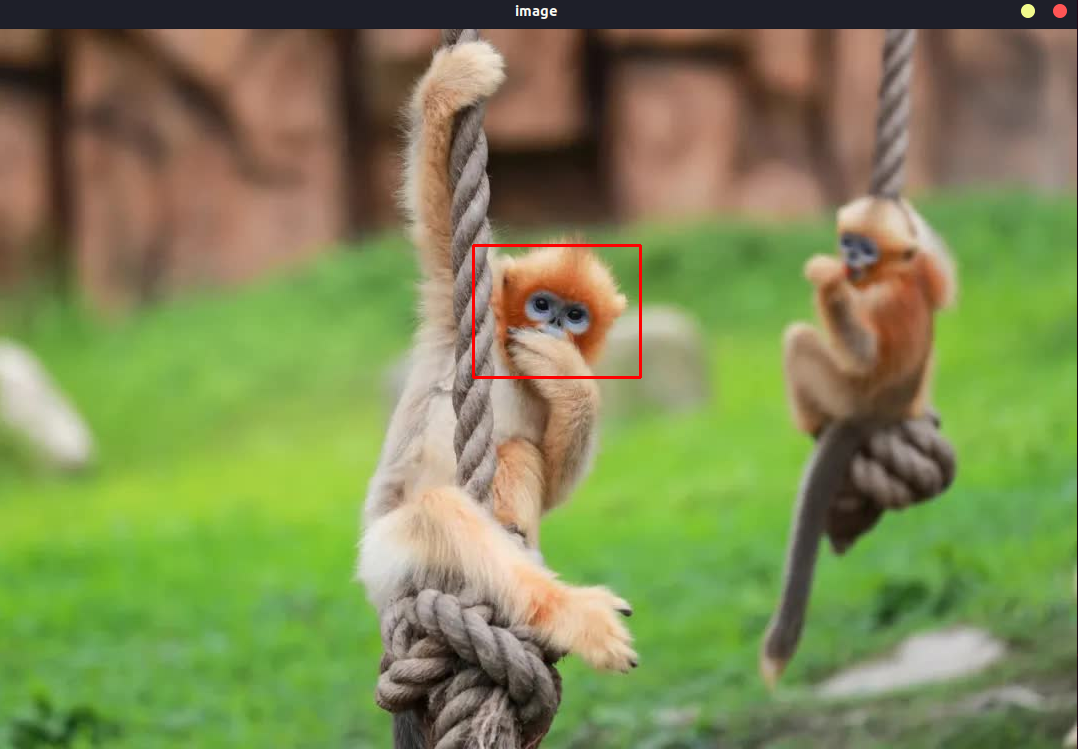
12 模板匹配¶
Opencv C++ API:
void matchTemplate(InputArray image, InputArray temp1,OutputArray result,int method)
Note
第一个参数,InputArray类型的image,待搜索的图像,且需位8位或32位浮点型图像。
第二个参数,InputArray类型的temp1,搜索模板,需和源图片有一样的数据类型,且尺寸不能大于源图像。
第三个参数,OutputArray类型的result,比较结果的映射图像。其必须为单通道、32位浮点型图像。如果图像尺寸是WxH而temp1尺寸是wxh,则 此参数result一定是(W-w+1)x(H-h+1)。
- 第四个参数,int类型的method,指定的匹配方法,OpenCV为我们提供了6种匹配方法。
平方差匹配法 method=TM_SQDIFF
归一化平方差匹配法 method=TM_SQDIFF_NORMED
相关匹配法 method=TM_CCORR
归一化相关匹配法 method=TM_CCORR_NORMED
系数匹配法 method=TM_CCOEFF
归一化相关系数匹配法 method=TM_CCOEFF_NORMED
demo调用, 源码
TEST(MatchTemplate, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0018_monkey.jpg";
std::string template_image = GetOpenCVDatasetDirectory() + "/0018_monkey_template.png";
MatchTemplate demo;
demo.RunDemo(filename, template_image);
}
函数使用:
void MatchTemplate::RunDemo(const std::string& filename, const std::string& template_file)
{
// 加载源图像和模板图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::Mat template_image = cv::imread(template_file);
if (template_image.data == nullptr) {
std::cout << "Load template_image error." << std::endl;
exit(-1);
}
cv::Mat ftmp;
cv::matchTemplate(image, template_image, ftmp, 5); //模板匹配
std::cerr << cv::TM_CCOEFF_NORMED << std::endl;
cv::normalize(ftmp, ftmp, 1, 0, cv::NORM_MINMAX); // 可以不归一化
double minVal; double maxVal;
cv::Point minLoc;
cv::Point maxLoc;
cv::minMaxLoc(ftmp, &minVal, &maxVal, &minLoc, &maxLoc); // 找到最佳匹配点
// 从匹配结果图像中找出最佳匹配点
cv::rectangle(image, cv::Rect(maxLoc.x, maxLoc.y, template_image.cols,
template_image.rows), cv::Scalar(0, 0, 255), 2, 8); // 画出匹配到的矩形框
cv::imshow("image", image);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.matchTemplate_test
参考源码:
Note
matchTemplate_test.cpp
matchTemplate.cpp
matchTemplate.h
13 霍夫线变换¶
Opencv C++ API:
void HoughLines( InputArray image, OutputArray lines,
double rho, double theta, int threshold,
double srn = 0, double stn = 0,
double min_theta = 0, double max_theta = CV_PI );
Note
InputArray类型的image,输入图像,需为8位的单通道二进制图像。
InputArray类型的lines,调用HoughLines函数后存储了霍夫线变换检测到线条的输出矢量。每一条线由具有两个元素的矢量(r,t)表示。r为离坐标原点的距离,t为弧度线条旋转角度。
double类型的rho,以像素为单位的距离精度。
double类型的theta,以弧度为单位的角度精度。
int类型的threshold,累加平面的阈值参数,即识别某部分为图中一直线时它在累加平面中必须达到的值。大于阈值的线段才可以被检测通过并返回到结果中。
double类型的srn,默认值0。对于多尺度的霍夫变换,这是第三个参数rho的除数距离。粗略的累加器进步尺寸是rho,而精确的累加器进步尺寸为rho/srn。
double类型的stn,默认值0。对于多尺度的霍夫变换,这是第四个参数theta的除数距离。粗略的累加器进步尺寸是theta,而精确的累加器进步尺寸为theta/srn。
double类型的min_theta,对于标准和多尺度霍夫变换,检查线的最小角度。必须介于 0 和 max_theta 之间。
double类型的max_theta,对于标准和多尺度霍夫变换,检查线的最大角度。必须介于 min_theta 和 CV_PI 之间。
demo调用, 源码
TEST(HoughLines, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0019_hough_line_2.png";
HoughLines demo;
demo.RunDemo(filename);
}
函数使用:
void HoughLines::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
cv::Mat mid, dst;
cv::Canny(image, mid, 100, 200, 3);
cv::cvtColor(mid, dst, cv::COLOR_GRAY2BGR);
// 标准霍夫变换,直线检测
std::vector<cv::Vec2f> lines;
cv::HoughLines(mid, lines, 1, CV_PI / 180.0, 200, 0, 0);
for (size_t i = 0; i < lines.size(); ++i)
{
float rho = lines[i][0], theta = lines[i][1];
cv::Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a * rho, y0 = b * rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
cv::line(dst, pt1, pt2, cv::Scalar(255, 0, 0), 1, cv::LINE_AA);
}
cv::imshow("mid", mid);
cv::imshow("result", dst);
while (true) {
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.hough_lines_test

参考源码:
Note
hough_lines_test.cpp
hough_lines.cpp
hough_lines.h
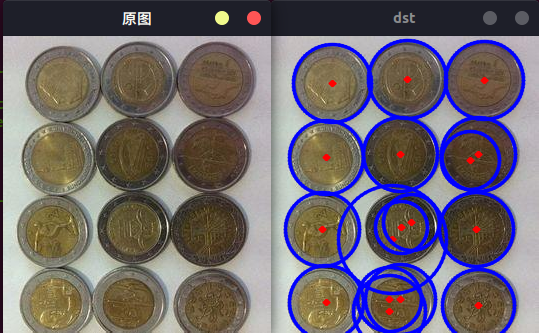
14 霍夫圆变换¶
Opencv C++ API:
void HoughCircles( InputArray image, OutputArray circles,
int method, double dp, double minDist,
double param1 = 100, double param2 = 100,
int minRadius = 0, int maxRadius = 0 )
Note
image:输入图像:8-bit,灰度图
circles:输出圆的结果。
method:定义检测图像中圆的方法。目前唯一实现的方法是HOUGH_GRADIENT。
dp:寻找圆弧圆心的累计分辨率,这个参数允许创建一个比输入图像分辨率低的累加器。(这样做是因为有理由认为图像中存在的圆会自然降低到与图像宽高相同数量的范畴)。如果dp设置为1,则分辨率是相同的;如果设置为更大的值(比如2),累加器的分辨率受此影响会变小(此情况下为一半)。dp的值不能比1小。
minDist:该参数是让算法能明显区分的两个不同圆之间的最小距离。
param1 :用于Canny的边缘阀值上限,下限被置为上限的一半。
param2:HOUGH_GRADIENT方法的累加器阈值。阈值越小,检测到的圈子越多。
minRadius :最小圆半径。
maxRadius:最大圆半径。
demo调用, 源码
TEST(HoughCircles, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0020_hough_circle_1.jpeg";
HoughCircles demo;
demo.RunDemo(filename);
}
函数使用:
void HoughCircles::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
cv::imshow("原图", image);
cv::Mat mout;
cv::medianBlur(image, mout, 7); // 中值滤波降噪
cv::cvtColor(mout, mout, cv::COLOR_BGR2GRAY); // 转换为灰度图像
std::vector<cv::Vec3f> circles; // 存储圆的容器
cv::HoughCircles(mout, circles, cv::HOUGH_GRADIENT, 1, 10, 100, 30, 5, 100); // 进行霍夫圆检测
cv::Scalar circleColor = cv::Scalar(255, 0, 0); // 圆形的边缘颜色
cv::Scalar centerColor = cv::Scalar(0, 0, 255); // 圆心的颜色
for (int i = 0; i < circles.size(); i++) {
cv::Vec3f c = circles[i];
cv::circle(image, cv::Point(c[0], c[1]),c[2], circleColor, 2, cv::LINE_AA); // 画边缘
cv::circle(image, cv::Point(c[0], c[1]), 2, centerColor, 2, cv::LINE_AA); // 画圆心
}
cv::imshow("dst", image); // 显示处理后的图像
while (true) {
if (27 == cv::waitKey()) { // ESC key
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.hough_circles_test
参考源码:
Note
hough_circles_test.cpp
hough_circles.cpp
hough_circles.h
15 图像分割与Watershed算法¶
Opencv C++ API:
void watershed( InputArray image, InputOutputArray markers );
Note
第一个参数 image,必须是一个8bit 3通道彩色图像矩阵序列,第一个参数没什么要说的
demo调用, 源码
TEST(Watershed, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0023_cards.png";
Watershed demo;
demo.RunDemo(filename);
}
函数使用:
void Watershed::RunDemo(const std::string& filename)
{
// 0. 读取图像
cv::Mat src = cv::imread(filename, cv::IMREAD_GRAYSCALE);
if (src.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
imshow("Source Image", src);
// Change the background from white to black, since that will help later to extract
// better results during the use of Distance Transform
for( int x = 0; x < src.rows; x++ ) {
for( int y = 0; y < src.cols; y++ ) {
if ( src.at<Vec3b>(x, y) == Vec3b(255,255,255) ) {
src.at<Vec3b>(x, y)[0] = 0;
src.at<Vec3b>(x, y)[1] = 0;
src.at<Vec3b>(x, y)[2] = 0;
}
}
}
// Show output image
imshow("Black Background Image", src);
// Create a kernel that we will use for accuting/sharpening our image
Mat kernel = (Mat_<float>(3,3) <<
1, 1, 1,
1, -8, 1,
1, 1, 1); // an approximation of second derivative, a quite strong kernel
// do the laplacian filtering as it is
// well, we need to convert everything in something more deeper then CV_8U
// because the kernel has some negative values,
// and we can expect in general to have a Laplacian image with negative values
// BUT a 8bits unsigned int (the one we are working with) can contain values from 0 to 255
// so the possible negative number will be truncated
Mat imgLaplacian;
Mat sharp = src; // copy source image to another temporary one
filter2D(sharp, imgLaplacian, CV_32F, kernel);
src.convertTo(sharp, CV_32F);
Mat imgResult = sharp - imgLaplacian;
// convert back to 8bits gray scale
imgResult.convertTo(imgResult, CV_8UC3);
imgLaplacian.convertTo(imgLaplacian, CV_8UC3);
// imshow( "Laplace Filtered Image", imgLaplacian );
imshow( "New Sharped Image", imgResult );
src = imgResult; // copy back
// Create binary image from source image
Mat bw;
cvtColor(src, bw, cv::COLOR_BGR2GRAY);
threshold(bw, bw, 40, 255, cv::THRESH_BINARY | cv::THRESH_OTSU);
imshow("Binary Image", bw);
// Perform the distance transform algorithm
Mat dist;
distanceTransform(bw, dist, cv::DIST_L2, 3);
// Normalize the distance image for range = {0.0, 1.0}
// so we can visualize and threshold it
normalize(dist, dist, 0, 1., cv::NORM_MINMAX);
imshow("Distance Transform Image", dist);
// Threshold to obtain the peaks
// This will be the markers for the foreground objects
threshold(dist, dist, .4, 1., cv::THRESH_BINARY);
// Dilate a bit the dist image
Mat kernel1 = Mat::ones(3, 3, CV_8UC1);
dilate(dist, dist, kernel1);
imshow("Peaks", dist);
// Create the CV_8U version of the distance image
// It is needed for findContours()
Mat dist_8u;
dist.convertTo(dist_8u, CV_8U);
// Find total markers
vector<vector<Point> > contours;
findContours(dist_8u, contours, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE);
// Create the marker image for the watershed algorithm
Mat markers = Mat::zeros(dist.size(), CV_32SC1);
// Draw the foreground markers
for (size_t i = 0; i < contours.size(); i++)
drawContours(markers, contours, static_cast<int>(i), Scalar::all(static_cast<int>(i)+1), -1);
// Draw the background marker
circle(markers, Point(5,5), 3, CV_RGB(255,255,255), -1);
imshow("Markers", markers*10000);
// Perform the watershed algorithm
watershed(src, markers);
Mat mark = Mat::zeros(markers.size(), CV_8UC1);
markers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark);
// imshow("Markers_v2", mark); // uncomment this if you want to see how the mark
// image looks like at that point
// Generate random colors
vector<Vec3b> colors;
for (size_t i = 0; i < contours.size(); i++)
{
int b = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int r = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// Create the result image
Mat dst = Mat::zeros(markers.size(), CV_8UC3);
// Fill labeled objects with random colors
for (int i = 0; i < markers.rows; i++)
{
for (int j = 0; j < markers.cols; j++)
{
int index = markers.at<int>(i,j);
if (index > 0 && index <= static_cast<int>(contours.size()))
dst.at<Vec3b>(i,j) = colors[index-1];
else
dst.at<Vec3b>(i,j) = Vec3b(0,0,0);
}
}
// Visualize the final image
imshow("Final Result", dst);
while (true)
{
if (27 == cv::waitKey()) {
break;
}
sleep(1);
}
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.image_processing.watershed_test
参考源码:
Note
watershed_test.cpp
watershed.cpp
watershed.h
16 交互式前景提取使用GrabCut算法¶
Opencv C++ API:
demo调用, 源码
函数使用:
运行结果
[bin] ./xslam.opencv.image_processing.image_gradient_test
参考源码:
Note
image_gradient_test.cpp
image_gradient.cpp
image_gradient.h