Geometry¶
1 Fundamentals Matrix¶
Opencv C++ API:
CV_EXPORTS_W Mat findFundamentalMat( InputArray points1, InputArray points2,
int method = FM_RANSAC,
double param1 = 3., double param2 = 0.99,
OutputArray mask = noArray() );
Note
points1:第一张图像的N个点;
points2: 第二张图像的点;
param1: 该参数用于RANSAC算法(随机采样过程一致性),它是从点到对极线的最大距离(以像素为单位),超过该距离,该点被视为异常值,并且不用于计算最终的基础矩阵。 可以将其设置为1-3,具体取决于点定位的精度,图像分辨率和图像噪声。
param2: 该参数仅仅在RANSAC算法以及LMedS算法中, 它指定了估计矩阵正确的期望置信度(概率)。
计算基础矩阵的方法
7点法
8点法 矩阵E中有九个参数,根据尺度不变性,可以通过八对点估计基础矩阵,也就是所谓的八点法
RANSAC算法
LMedS算法
enum
{
FM_7POINT = 1, //!< 7-point algorithm
FM_8POINT = 2, //!< 8-point algorithm
FM_LMEDS = 4, //!< least-median algorithm
FM_RANSAC = 8 //!< RANSAC algorithm
};
demo调用
TEST(PoseEstimation2D2D, pose_estimation_2d)
{
std::string image1 = GetOpenCVDatasetDirectory() + "/0003_orb_feature_detector.png";
std::string image2 = GetOpenCVDatasetDirectory() + "/0004_orb_feature_detector.png";
// OpenCV
PoseEstimation2D2D demo;
demo.RunDemo(image1, image2);
}
函数使用:
/**
* 本程序演示了如何使用2D-2D的特征匹配估计相机运动
*/
class PoseEstimation2D2D
{
public:
void RunDemo(const std::string& iamge_1, const std::string& iamge_2);
private:
void FindFeatureMatches(
const cv::Mat &img_1, const cv::Mat &img_2,
std::vector<cv::KeyPoint> &keypoints_1,
std::vector<cv::KeyPoint> &keypoints_2,
std::vector<cv::DMatch> &matches);
void PoseEstimation_2D2D(
std::vector<cv::KeyPoint> keypoints_1,
std::vector<cv::KeyPoint> keypoints_2,
std::vector<cv::DMatch> matches,
cv::Mat &R, cv::Mat &t);
// 像素坐标转相机归一化坐标
cv::Point2d Pixel2Cam(const cv::Point2d &p, const cv::Mat &K);
};
void PoseEstimation2D2D::RunDemo(const std::string& iamge_1, const std::string& iamge_2)
{
//-- 读取图像
cv::Mat img_1 = cv::imread(iamge_1);
cv::Mat img_2 = cv::imread(iamge_2);
assert(img_1.data && img_2.data && "Can not load images!");
std::vector<cv::KeyPoint> keypoints_1, keypoints_2;
std::vector<cv::DMatch> matches;
FindFeatureMatches(img_1, img_2, keypoints_1, keypoints_2, matches);
std::cout << "一共找到了" << matches.size() << "组匹配点" << std::endl;
//-- 估计两张图像间运动
cv:: Mat R, t;
PoseEstimation_2D2D(keypoints_1, keypoints_2, matches, R, t);
//-- 验证E=t^R*scale
cv::Mat t_x =
(cv::Mat_<double>(3, 3) << 0, -t.at<double>(
2, 0), t.at<double>(1, 0),
t.at<double>(2, 0), 0, -t.at<double>(0, 0),
-t.at<double>(1, 0), t.at<double>(0, 0), 0);
std::cout << "t^R=" << std::endl << t_x * R << std::endl;
//-- 验证对极约束
cv::Mat K = (cv::Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
for (cv::DMatch m: matches)
{
cv::Point2d pt1 = Pixel2Cam(keypoints_1[m.queryIdx].pt, K);
cv::Mat y1 = (cv::Mat_<double>(3, 1) << pt1.x, pt1.y, 1);
cv::Point2d pt2 = Pixel2Cam(keypoints_2[m.trainIdx].pt, K);
cv::Mat y2 = (cv::Mat_<double>(3, 1) << pt2.x, pt2.y, 1);
cv::Mat d = y2.t() * t_x * R * y1;
std::cout << "epipolar constraint = " << d << std::endl;
}
}
void PoseEstimation2D2D::FindFeatureMatches(
const cv::Mat &img_1, const cv::Mat &img_2,
std::vector<cv::KeyPoint> &keypoints_1,
std::vector<cv::KeyPoint> &keypoints_2,
std::vector<cv::DMatch> &matches)
{
//-- 初始化
cv::Mat descriptors_1, descriptors_2;
// used in OpenCV3
cv::Ptr<cv::FeatureDetector> detector = cv::ORB::create();
cv::Ptr<cv::DescriptorExtractor> descriptor = cv::ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
std::vector<cv::DMatch> match;
//BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= std::max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
void PoseEstimation2D2D::PoseEstimation_2D2D(
std::vector<cv::KeyPoint> keypoints_1,
std::vector<cv::KeyPoint> keypoints_2,
std::vector<cv::DMatch> matches,
cv::Mat &R, cv::Mat &t)
{
// 相机内参,TUM Freiburg2
cv::Mat K = (cv::Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
//-- 把匹配点转换为vector<Point2f>的形式
std::vector<cv::Point2f> points1;
std::vector<cv::Point2f> points2;
for (int i = 0; i < (int) matches.size(); i++) {
points1.push_back(keypoints_1[matches[i].queryIdx].pt);
points2.push_back(keypoints_2[matches[i].trainIdx].pt);
}
//-- 计算基础矩阵
cv::Mat fundamental_matrix;
fundamental_matrix = cv::findFundamentalMat(points1, points2, cv::FM_8POINT);
std::cout << "fundamental_matrix is " << std::endl << fundamental_matrix << std::endl;
//-- 计算本质矩阵
cv::Point2d principal_point(325.1, 249.7); //相机光心, TUM dataset标定值
double focal_length = 521; //相机焦距, TUM dataset标定值
cv::Mat essential_matrix;
essential_matrix = cv::findEssentialMat(points1, points2, focal_length, principal_point);
std::cout << "essential_matrix is " << std::endl << essential_matrix << std::endl;
//-- 计算单应矩阵
//-- 但是本例中场景不是平面,单应矩阵意义不大
cv::Mat homography_matrix;
homography_matrix = cv::findHomography(points1, points2, cv::RANSAC, 3);
std::cout << "homography_matrix is " << std::endl << homography_matrix << std::endl;
//-- 从本质矩阵中恢复旋转和平移信息.
// 此函数仅在Opencv3中提供
cv::recoverPose(essential_matrix, points1, points2, R, t, focal_length, principal_point);
std::cout << "R is " << std::endl << R << std::endl;
std::cout << "t is " << std::endl << t << std::endl;
}
cv::Point2d PoseEstimation2D2D::Pixel2Cam(const cv::Point2d &p, const cv::Mat &K)
{
return cv::Point2d
{
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
};
}
运行结果
[bin] ./xslam.opencv.geometry_transform.pose_estimation_2d2d_test
-- Max dist : 94.000000
-- Min dist : 4.000000
一共找到了79组匹配点
fundamental_matrix is
[4.54443750398184e-06, 0.0001333855576992603, -0.01798499246479044;
-0.0001275657012964255, 2.266794804645652e-05, -0.01416678429206633;
0.01814994639971766, 0.004146055870980492, 1]
essential_matrix is
[-0.008455114492964278, 0.05451570701059781, 0.1546375809484052;
-0.008287154708445212, 0.03351311565984172, -0.6896472136971504;
-0.1153993974485718, 0.6945899967012867, 0.02159624094256633]
homography_matrix is
[0.9261214237658335, -0.1445322040802305, 33.26921164265664;
0.04535424230636757, 0.9386696658342905, 8.570980713233848;
-1.006198269424755e-05, -3.008140685985328e-05, 1]
R is
[0.9956584940813579, -0.05615340406690447, 0.07423582945816433;
0.05268846331440004, 0.9974645001566195, 0.04783823534446425;
-0.07673388428334535, -0.0437191735855581, 0.9960926386957119]
t is
[-0.9726703113454949;
-0.2153829834753195;
0.08673313009645391]
t^R=
[0.01195733758736675, -0.07709685221674556, -0.2186905642298021;
0.01171980658216709, -0.04739470268352609, 0.9753084428633267;
0.1631993929614534, -0.9822985936236425, -0.03054169683725466]
epipolar constraint = [-0.0005617285518606241]
epipolar constraint = [0.002891683190146016]
epipolar constraint = [-0.0001941259398173245]
epipolar constraint = [0.003462947761727536]
epipolar constraint = [8.120001470268701e-06]
...
epipolar constraint = [0.005653889777384447]
epipolar constraint = [0.0008830143247820065]
epipolar constraint = [-0.001103292290051336]
epipolar constraint = [-0.003982708195313309]
epipolar constraint = [-0.0053874915375101]
参考源码:
Note
pose_estimation_2d2d_test.cpp
pose_estimation_2d2d.cpp
pose_estimation_2d2d.h
2 Essential Matrix¶
demo调用
函数使用:
运行结果
[bin] ./xslam.opencv.geometry_transform.pose_estimation_2d2d_test
3 PnP¶
Opencv C++ API:
void solvePnP(
InputArray objectPoints,
InputArray imagePoints,
InputArray cameraMatrix, InputArray distCoeffs,
OutputArray rvec, OutputArray tvec,
bool useExtrinsicGuess=false,
int flags = CV_ITERATIVE)
Note
objectPoints - 世界坐标系下的控制点的坐标,vector的数据类型在这里可以使用
imagePoints - 在图像坐标系下对应的控制点的坐标。vector在这里可以使用
cameraMatrix - 相机的内参矩阵
distCoeffs - 相机的畸变系数
rvec - 输出的旋转向量。使坐标点从世界坐标系旋转到相机坐标系
tvec - 输出的平移向量。使坐标点从世界坐标系平移到相机坐标系
flags - 默认使用CV_ITERATIV迭代法
solvePnP里有三种解法
P3P、 EPnP、迭代法(默认);
opencv2里对应的参数分别为: CV_P3P、CV_EPNP、CV_ITERATIVE(opencv3里多了DLS和UPnP解法)
demo调用
TEST(PoseEstimation3D2D, pose_estimation_2d)
{
std::string image1 = GetOpenCVDatasetDirectory() + "/0024_1.png";
std::string depth1 = GetOpenCVDatasetDirectory() + "/0024_1_depth.png";
std::string image2 = GetOpenCVDatasetDirectory() + "/0024_2.png";
std::string depth2 = GetOpenCVDatasetDirectory() + "/0024_2_depth.png";
// OpenCV
PoseEstimation3D2D demo;
demo.RunDemo(image1, depth1, image2, depth2);
}
函数使用:
// vertex and edges used in g2o ba
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
virtual void setToOriginImpl() override
{
_estimate = Sophus::SE3d();
}
// left multiplication on SE3
virtual void oplusImpl(const double *update) override
{
Eigen::Matrix<double, 6, 1> update_eigen;
update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];
_estimate = Sophus::SE3d::exp(update_eigen) * _estimate;
}
virtual bool read(std::istream &in) override {}
virtual bool write(std::ostream &out) const override {}
};
class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {}
virtual void computeError() override
{
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_pixel = _K * (T * _pos3d);
pos_pixel /= pos_pixel[2];
_error = _measurement - pos_pixel.head<2>();
}
virtual void linearizeOplus() override
{
const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);
Sophus::SE3d T = v->estimate();
Eigen::Vector3d pos_cam = T * _pos3d;
double fx = _K(0, 0);
double fy = _K(1, 1);
double cx = _K(0, 2);
double cy = _K(1, 2);
double X = pos_cam[0];
double Y = pos_cam[1];
double Z = pos_cam[2];
double Z2 = Z * Z;
_jacobianOplusXi
<< -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z,
0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z;
}
virtual bool read(std::istream &in) override {}
virtual bool write(std::ostream &out) const override {}
private:
Eigen::Vector3d _pos3d;
Eigen::Matrix3d _K;
};
class PoseEstimation3D2D
{
public:
// BA by g2o
using VecVector2d = std::vector<Eigen::Vector2d, Eigen::aligned_allocator<Eigen::Vector2d>>;
using VecVector3d = std::vector<Eigen::Vector3d, Eigen::aligned_allocator<Eigen::Vector3d>>;
void RunDemo(const std::string& iamge_1, const std::string& iamge_depth_1,
const std::string& iamge_2, const std::string& iamge_depth_2);
private:
void FindFeatureMatches(
const cv::Mat &img_1, const cv::Mat &img_2,
std::vector<cv::KeyPoint> &keypoints_1,
std::vector<cv::KeyPoint> &keypoints_2,
std::vector<cv::DMatch> &matches);
void BundleAdjustmentG2O(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const cv::Mat &K,
Sophus::SE3d &pose);
// BA by gauss-newton
void BundleAdjustmentGaussNewton(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const cv::Mat &K,
Sophus::SE3d &pose);
// 像素坐标转相机归一化坐标
cv::Point2d Pixel2Cam(const cv::Point2d &p, const cv::Mat &K);
};
void PoseEstimation3D2D::PoseEstimation3D2D::RunDemo(
const std::string& iamge_1, const std::string& iamge_depth_1,
const std::string& iamge_2, const std::string& iamge_depth_2)
{
//-- 读取图像
cv::Mat img_1 = cv::imread(iamge_1, cv::IMREAD_COLOR);
cv::Mat img_2 = cv::imread(iamge_2, cv::IMREAD_COLOR);
assert(img_1.data && img_2.data && "Can not load images!");
std::vector<cv::KeyPoint> keypoints_1, keypoints_2;
std::vector<cv::DMatch> matches;
FindFeatureMatches(img_1, img_2, keypoints_1, keypoints_2, matches);
std::cout << "一共找到了" << matches.size() << "组匹配点" << std::endl;
// 建立3D点
cv::Mat d1 = cv::imread(iamge_depth_1, cv::IMREAD_UNCHANGED); // 深度图为16位无符号数,单通道图像
cv::Mat K = (cv::Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);
std::vector<cv::Point3f> pts_3d;
std::vector<cv::Point2f> pts_2d;
for (cv::DMatch m : matches) {
ushort d = d1.ptr<unsigned short>(int(keypoints_1[m.queryIdx].pt.y))[int(keypoints_1[m.queryIdx].pt.x)];
if (d == 0) // bad depth
continue;
float dd = d / 5000.0;
cv::Point2d p1 = Pixel2Cam(keypoints_1[m.queryIdx].pt, K);
pts_3d.push_back(cv::Point3f(p1.x * dd, p1.y * dd, dd));
pts_2d.push_back(keypoints_2[m.trainIdx].pt);
}
std::cout << "3d-2d pairs: " << pts_3d.size() << std::endl;
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
cv::Mat r, t;
cv::solvePnP(pts_3d, pts_2d, K, cv::Mat(), r, t, false); // 调用OpenCV 的 PnP 求解,可选择EPNP,DLS等方法
cv::Mat R;
cv::Rodrigues(r, R); // r为旋转向量形式,用Rodrigues公式转换为矩阵
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
std::chrono::duration<double> time_used = std::chrono::duration_cast<std::chrono::duration<double>>(t2 - t1);
std::cout << "solve pnp in opencv cost time: " << time_used.count() << " seconds." << std::endl;
std::cout << "R=" << std::endl << R << std::endl;
std::cout << "t=" << std::endl << t << std::endl;
VecVector3d pts_3d_eigen;
VecVector2d pts_2d_eigen;
for (size_t i = 0; i < pts_3d.size(); ++i)
{
pts_3d_eigen.push_back(Eigen::Vector3d(pts_3d[i].x, pts_3d[i].y, pts_3d[i].z));
pts_2d_eigen.push_back(Eigen::Vector2d(pts_2d[i].x, pts_2d[i].y));
}
std::cout << "calling bundle adjustment by gauss newton" << std::endl;
Sophus::SE3d pose_gn;
t1 = std::chrono::steady_clock::now();
BundleAdjustmentGaussNewton(pts_3d_eigen, pts_2d_eigen, K, pose_gn);
t2 = std::chrono::steady_clock::now();
time_used = std::chrono::duration_cast<std::chrono::duration<double>>(t2 - t1);
std::cout << "solve pnp by gauss newton cost time: " << time_used.count() << " seconds." << std::endl;
std::cout << "calling bundle adjustment by g2o" << std::endl;
Sophus::SE3d pose_g2o;
t1 = std::chrono::steady_clock::now();
BundleAdjustmentG2O(pts_3d_eigen, pts_2d_eigen, K, pose_g2o);
t2 = std::chrono::steady_clock::now();
time_used = std::chrono::duration_cast<std::chrono::duration<double>>(t2 - t1);
std::cout << "solve pnp by g2o cost time: " << time_used.count() << " seconds." << std::endl;
}
void PoseEstimation3D2D::FindFeatureMatches(
const cv::Mat &img_1, const cv::Mat &img_2,
std::vector<cv::KeyPoint> &keypoints_1,
std::vector<cv::KeyPoint> &keypoints_2,
std::vector<cv::DMatch> &matches)
{
//-- 初始化
cv::Mat descriptors_1, descriptors_2;
// used in OpenCV3
cv::Ptr<cv::FeatureDetector> detector = cv::ORB::create();
cv::Ptr<cv::DescriptorExtractor> descriptor = cv::ORB::create();
// use this if you are in OpenCV2
// Ptr<FeatureDetector> detector = FeatureDetector::create ( "ORB" );
// Ptr<DescriptorExtractor> descriptor = DescriptorExtractor::create ( "ORB" );
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create("BruteForce-Hamming");
//-- 第一步:检测 Oriented FAST 角点位置
detector->detect(img_1, keypoints_1);
detector->detect(img_2, keypoints_2);
//-- 第二步:根据角点位置计算 BRIEF 描述子
descriptor->compute(img_1, keypoints_1, descriptors_1);
descriptor->compute(img_2, keypoints_2, descriptors_2);
//-- 第三步:对两幅图像中的BRIEF描述子进行匹配,使用 Hamming 距离
std::vector<cv::DMatch> match;
// BFMatcher matcher ( NORM_HAMMING );
matcher->match(descriptors_1, descriptors_2, match);
//-- 第四步:匹配点对筛选
double min_dist = 10000, max_dist = 0;
//找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
for (int i = 0; i < descriptors_1.rows; i++) {
double dist = match[i].distance;
if (dist < min_dist) min_dist = dist;
if (dist > max_dist) max_dist = dist;
}
printf("-- Max dist : %f \n", max_dist);
printf("-- Min dist : %f \n", min_dist);
//当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
for (int i = 0; i < descriptors_1.rows; i++) {
if (match[i].distance <= std::max(2 * min_dist, 30.0)) {
matches.push_back(match[i]);
}
}
}
void PoseEstimation3D2D::BundleAdjustmentG2O(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const cv::Mat &K,
Sophus::SE3d &pose)
{
// 构建图优化,先设定g2o
typedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
// 梯度下降方法,可以从GN, LM, DogLeg 中选
auto solver = new g2o::OptimizationAlgorithmGaussNewton(
g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm(solver); // 设置求解器
optimizer.setVerbose(true); // 打开调试输出
// vertex
VertexPose *vertex_pose = new VertexPose(); // camera vertex_pose
vertex_pose->setId(0);
vertex_pose->setEstimate(Sophus::SE3d());
optimizer.addVertex(vertex_pose);
// K
Eigen::Matrix3d K_eigen;
K_eigen <<
K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2),
K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2),
K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2);
// edges
int index = 1;
for (size_t i = 0; i < points_2d.size(); ++i) {
auto p2d = points_2d[i];
auto p3d = points_3d[i];
EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);
edge->setId(index);
edge->setVertex(0, vertex_pose);
edge->setMeasurement(p2d);
edge->setInformation(Eigen::Matrix2d::Identity());
optimizer.addEdge(edge);
index++;
}
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
optimizer.setVerbose(true);
optimizer.initializeOptimization();
optimizer.optimize(10);
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
std::chrono::duration<double> time_used = std::chrono::duration_cast<std::chrono::duration<double>>(t2 - t1);
std::cout << "optimization costs time: " << time_used.count() << " seconds." << std::endl;
std:: cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << std::endl;
pose = vertex_pose->estimate();
}
void PoseEstimation3D2D::BundleAdjustmentGaussNewton(
const VecVector3d &points_3d,
const VecVector2d &points_2d,
const cv::Mat &K,
Sophus::SE3d &pose)
{
typedef Eigen::Matrix<double, 6, 1> Vector6d;
const int iterations = 10;
double cost = 0, lastCost = 0;
double fx = K.at<double>(0, 0);
double fy = K.at<double>(1, 1);
double cx = K.at<double>(0, 2);
double cy = K.at<double>(1, 2);
for (int iter = 0; iter < iterations; iter++) {
Eigen::Matrix<double, 6, 6> H = Eigen::Matrix<double, 6, 6>::Zero();
Vector6d b = Vector6d::Zero();
cost = 0;
// compute cost
for (int i = 0; i < points_3d.size(); i++) {
Eigen::Vector3d pc = pose * points_3d[i];
double inv_z = 1.0 / pc[2];
double inv_z2 = inv_z * inv_z;
Eigen::Vector2d proj(fx * pc[0] / pc[2] + cx, fy * pc[1] / pc[2] + cy);
Eigen::Vector2d e = points_2d[i] - proj;
cost += e.squaredNorm();
Eigen::Matrix<double, 2, 6> J;
J << -fx * inv_z,
0,
fx * pc[0] * inv_z2,
fx * pc[0] * pc[1] * inv_z2,
-fx - fx * pc[0] * pc[0] * inv_z2,
fx * pc[1] * inv_z,
0,
-fy * inv_z,
fy * pc[1] * inv_z2,
fy + fy * pc[1] * pc[1] * inv_z2,
-fy * pc[0] * pc[1] * inv_z2,
-fy * pc[0] * inv_z;
H += J.transpose() * J;
b += -J.transpose() * e;
}
Vector6d dx;
dx = H.ldlt().solve(b);
if (isnan(dx[0])) {
std::cout << "result is nan!" << std::endl;
break;
}
if (iter > 0 && cost >= lastCost) {
// cost increase, update is not good
std::cout << "cost: " << cost << ", last cost: " << lastCost << std::endl;
break;
}
// update your estimation
pose = Sophus::SE3d::exp(dx) * pose;
lastCost = cost;
std::cout << "iteration " << iter << " cost=" << std::setprecision(12) << cost << std::endl;
if (dx.norm() < 1e-6) {
// converge
break;
}
}
std::cout << "pose by g-n: \n" << pose.matrix() << std::endl;
}
cv::Point2d PoseEstimation3D2D::Pixel2Cam(const cv::Point2d &p, const cv::Mat &K)
{
return cv::Point2d
{
(p.x - K.at<double>(0, 2)) / K.at<double>(0, 0),
(p.y - K.at<double>(1, 2)) / K.at<double>(1, 1)
};
}
运行结果
[bin] ./xslam.opencv.geometry_transform.pose_estimation_3d2d_test
Running main() from gmock_main.cc
[==========] Running 1 test from 1 test suite.
[----------] Global test environment set-up.
[----------] 1 test from PoseEstimation3D2D
[ RUN ] PoseEstimation3D2D.pose_estimation_2d
-- Max dist : 94.000000
-- Min dist : 4.000000
一共找到了79组匹配点
3d-2d pairs: 75
solve pnp in opencv cost time: 0.00233683 seconds.
R=
[0.9979059095501289, -0.05091940089111062, 0.03988747043647115;
0.04981866254254162, 0.9983623157438141, 0.02812094175381178;
-0.04125404886071617, -0.02607491352889358, 0.9988083912027663]
t=
[-0.1267821389556796;
-0.008439496817594587;
0.06034935748886031]
calling bundle adjustment by gauss newton
iteration 0 cost=40517.7576706
iteration 1 cost=410.547029116
iteration 2 cost=299.76468142
iteration 3 cost=299.763574327
pose by g-n:
0.997905909549 -0.0509194008562 0.0398874705187 -0.126782139096
0.049818662505 0.998362315745 0.0281209417649 -0.00843949683874
-0.0412540489424 -0.0260749135374 0.998808391199 0.0603493575229
0 0 0 1
solve pnp by gauss newton cost time: 8.796e-05 seconds.
calling bundle adjustment by g2o
iteration= 0 chi2= 410.547029 time= 1.4597e-05 cumTime= 1.4597e-05 edges= 75 schur= 0
iteration= 1 chi2= 299.764681 time= 8.711e-06 cumTime= 2.3308e-05 edges= 75 schur= 0
iteration= 2 chi2= 299.763574 time= 8.659e-06 cumTime= 3.1967e-05 edges= 75 schur= 0
iteration= 3 chi2= 299.763574 time= 7.967e-06 cumTime= 3.9934e-05 edges= 75 schur= 0
iteration= 4 chi2= 299.763574 time= 7.965e-06 cumTime= 4.7899e-05 edges= 75 schur= 0
iteration= 5 chi2= 299.763574 time= 2.7984e-05 cumTime= 7.5883e-05 edges= 75 schur= 0
iteration= 6 chi2= 299.763574 time= 2.0946e-05 cumTime= 9.6829e-05 edges= 75 schur= 0
iteration= 7 chi2= 299.763574 time= 8.356e-06 cumTime= 0.000105185 edges= 75 schur= 0
iteration= 8 chi2= 299.763574 time= 8.105e-06 cumTime= 0.00011329 edges= 75 schur= 0
iteration= 9 chi2= 299.763574 time= 8.142e-06 cumTime= 0.000121432 edges= 75 schur= 0
optimization costs time: 0.000459426 seconds.
pose estimated by g2o =
0.99790590955 -0.0509194008911 0.0398874704367 -0.126782138956
0.0498186625425 0.998362315744 0.0281209417542 -0.00843949681823
-0.0412540488609 -0.0260749135293 0.998808391203 0.0603493574888
0 0 0 1
solve pnp by g2o cost time: 0.000722355 seconds.
[ OK ] PoseEstimation3D2D.pose_estimation_2d (1784 ms)
[----------] 1 test from PoseEstimation3D2D (1784 ms total)
[----------] Global test environment tear-down
[==========] 1 test from 1 test suite ran. (1784 ms total)
[ PASSED ] 1 test.
参考源码:
Note
pose_estimation_3d2d_test.cpp
pose_estimation_3d2d.cpp
pose_estimation_3d2d.h
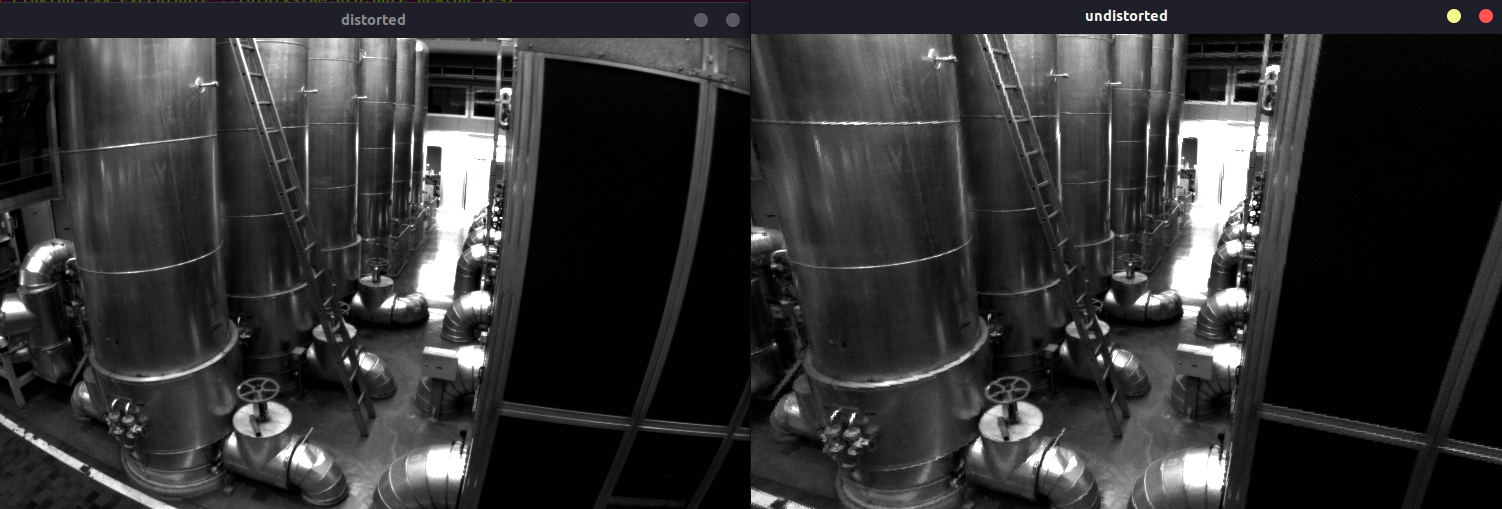
4 Undistort Points¶
Opencv C++ API:
void cv::undistortPoints(
InputArray src,
OutputArray dst,
InputArray cameraMatrix,
InputArray distCoeffs,
InputArray R = noArray(),
InputArray P = noArray())
Note
src 原始像素点矩阵 1xN or Nx1 (CV_32FC2 or CV_64FC2).
dst 矫正像素点矩阵
cameraMatrix 原相机内参矩阵
distCoeffs 相机畸变参数
R = noArray() 可选的修正变换矩阵
P = noArray() 新的相机矩阵
demo调用, 源码
TEST(UndistortedTransform, UndistortMethod)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0005_distorted.png";
UndistortedTransform demo;
demo.RunDemo(filename);
}
函数使用:
void UndistortedTransform::RunDemo(const std::string& filename)
{
// 畸变参数
const double k1 = -0.28340811, k2 = 0.07395907, p1 = 0.00019359, p2 = 1.76187114e-05;
// 内参
const double fx = 458.654, fy = 457.296, cx = 367.215, cy = 248.375;
cv::Mat image = cv::imread(filename, 0); // 图像是灰度图,CV_8UC1
int rows = image.rows, cols = image.cols;
cv::Mat image_undistort = cv::Mat(rows, cols, CV_8UC1); // 去畸变以后的图
// 计算去畸变后图像的内容
for (int v = 0; v < rows; v++)
{
for (int u = 0; u < cols; u++)
{
// 按照公式,计算点(u,v)对应到畸变图像中的坐标(u_distorted, v_distorted)
double x = (u - cx) / fx, y = (v - cy) / fy;
double r = sqrt(x * x + y * y);
double x_distorted = x * (1 + k1 * r * r + k2 * r * r * r * r) + 2 * p1 * x * y + p2 * (r * r + 2 * x * x);
double y_distorted = y * (1 + k1 * r * r + k2 * r * r * r * r) + p1 * (r * r + 2 * y * y) + 2 * p2 * x * y;
double u_distorted = fx * x_distorted + cx;
double v_distorted = fy * y_distorted + cy;
// 赋值 (最近邻插值)
if (u_distorted >= 0 && v_distorted >= 0 && u_distorted < cols && v_distorted < rows) {
image_undistort.at<uchar>(v, u) = image.at<uchar>((int) v_distorted, (int) u_distorted);
} else {
image_undistort.at<uchar>(v, u) = 0;
}
}
}
// 画图去畸变后图像
cv::imshow("distorted", image);
cv::imshow("undistorted", image_undistort);
cv::waitKey();
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.geometry_transform.undistorted_transform_test
参考源码:
Note
undistorted_transform_test.cpp
undistorted_transform.cpp
undistorted_transform.h