Feature Detection¶
1 理解特征¶
寻找独特的,易于跟踪和比较的特定模板或特定特征。如果我们对这种特征进行定义,可能会发现很难用语言来表达它, 但是我们知道它们是什么。如果有人要求你指出一项可以在多张图像中进行比较的良好特征,则可以指出其中一项。
因此,我们的一个基本问题扩展到更多,但变得更加具体。这些特征是什么?(答案对于计算机也应该是可以理解的。)
很难说人类如何发现这些特征。这已经在我们的大脑中进行了编码。但是,如果我们深入研究某些图片并搜索不同的模板, 我们会发现一些有趣的东西。例如,看以下的图片:

2 Harris角点检测¶
它基本上找到了 \((u,v)\) 在所有方向上位移的强度差异。表示如下:
窗口函数要么是一个矩形窗口,要么是高斯窗口,它在下面赋予了值。
我们必须最大化这个函数 \(E(u,v)\) 用于角检测。这意味着,我们必须最大化第二个项。 将泰勒扩展应用于上述方程,并使用一些数学步骤(请参考任何你喜欢的标准文本书), 我们得到最后的等式:
其中
在此,\(Ix\) 和 :math:`Iy`分别是在x和y方向上的图像导数。可以使用 cv::Sobel() 轻松找到.
然后是主要部分。之后,他们创建了一个分数,基本上是一个等式, 它将确定一个窗口是否可以包含一个角。
- 其中
\(det(M)=λ1λ2\)
\(trace(M)=λ1+λ2\)
\(λ1\) and \(λ2\) 是 \(M\) 的特征值
可以用如下图来表示:
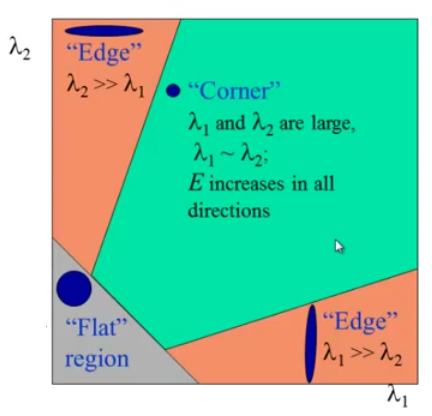
因此,Harris Corner Detection的结果是具有这些分数的灰度图像。 合适的阈值可为您提供图像的各个角落。我们将以一个简单的图像来完成它。
Opencv C++ API:
void cornerHarris( InputArray src, OutputArray dst, int block Size,
int ksize, double k, int borderType = BORDER_DEFAULT)
Note
InputArray类型的src,输入图像,即原图像,填Mat类型即可,且需要为单通道8位或者浮点型图像
OutputArray类型的dst,函数调用后的运算结果存在这里,即这个参数用于存放Harris角点检测的输出结果,和原图片有一样的尺寸和类型
int类型的blockSize,表示邻域的大小,更多详细信息在cornerEigenValsAndVecs()中讲到
int类型的ksize,表示Sobel()算子的孔径的大小
double类型的k,Harris参数
int类型的borderType,图像像素的边界模式。注意它有默认值BORDER_DEFAULT
demo调用, 源码
TEST(CornerHarris, cornerDetect)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0002_chessboard.jpeg";
CornerHarris demo;
demo.CornerDetect(filename);
}
函数使用:
void CornerHarris::CornerDetect(const std::string& filename)
{
// 1 read a image
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
// 2 convert to gray
cv::Mat gray;
cv::cvtColor(image, gray,cv::COLOR_BGR2GRAY);
// 3 cornerHarris角点检测
// 进行角点检测
// 领域大小为 2
// sobel 算子孔径 3
// harris 参数
cv::Mat dstImage; //目标图
cv::Mat normImage; //归一化后的图
cv::Mat scaledImage; //线性变换后的八位无符号整型的图
//置零当前需要显示的两幅图,即清除上一次调用此函数时他们的值
dstImage = cv::Mat::zeros(image.size(), CV_32FC1 );
cv::cornerHarris(gray, dstImage, 2, 3, 0.04, cv::BORDER_DEFAULT );
// 归一化与转换
cv::normalize( dstImage, normImage, 0, 255, cv::NORM_MINMAX, CV_32FC1, cv::Mat() );
convertScaleAbs( normImage, scaledImage ); //将归一化后的图线性变换成8位无符号整型
// 4、进行绘制
// 将检测到的,且符合阈值条件的角点绘制出来
int corner_count = 0;
for( int j = 0; j < normImage.rows ; j++ )
for( int i = 0; i < normImage.cols; i++ )
{
if( (int) normImage.at<float>(j,i) > 80 ) // 设定阈值
{
cv::circle(image, cv::Point( i, j ), 6, cv::Scalar(0,255,5), 2, 1, 0 );
}
}
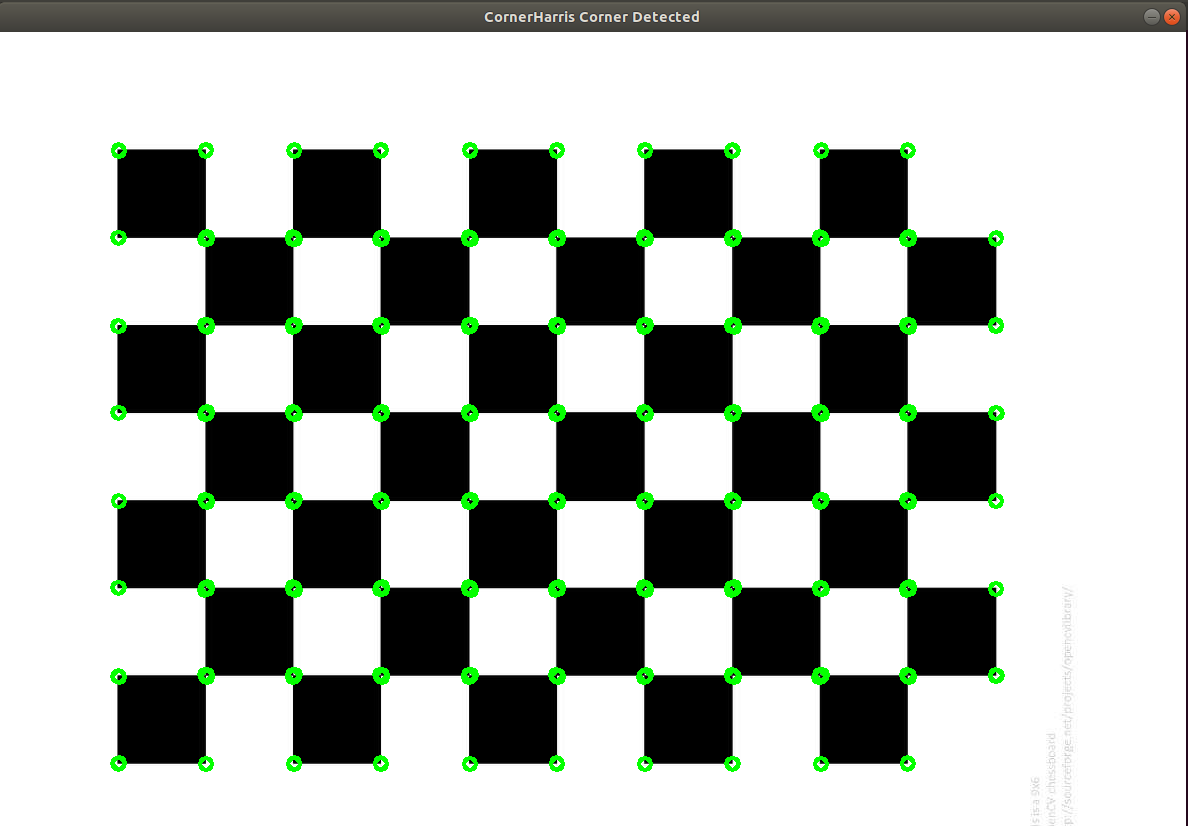
// 5 显示最终效果
cv::imshow("CornerHarris Corner Detected", image);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.feature_detection.corner_harris_test
参考源码:
Note
corner_harris_test.h
corner_harris.cpp
corner_harris.h
3 Fast ORB角点检测¶
Opencv C++ API:
Ptr<FastFeatureDetector> create(int threshold=10,
bool nonmaxSuppression=true,int type=FastFeatureDetector::TYPE_9_16 );
Note
threshold: 阈值
nonmaxSuppression: 非极大值抑制
type: 邻域类型
demo调用, 源码
TEST(FastFeature, cornerDetect)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0002_chessboard.jpeg";
FastFeature demo;
demo.CornerDetect(filename);
}
函数使用:
void FastFeature::CornerDetect(const std::string& filename)
{
// 1 read a image
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << std::endl;
exit(-1);
}
// 2 convert to gray
cv::Mat gray;
cv::cvtColor(image, gray,cv::COLOR_BGR2GRAY);
std::vector<cv::KeyPoint> keypoints;
cv::Mat dst = image.clone();
cv::Ptr<cv::FastFeatureDetector> detector = cv::FastFeatureDetector::create(40);
detector->detect(image,keypoints);
drawKeypoints(dst, keypoints, dst, cv::Scalar::all(-1), cv::DrawMatchesFlags::DRAW_OVER_OUTIMG);
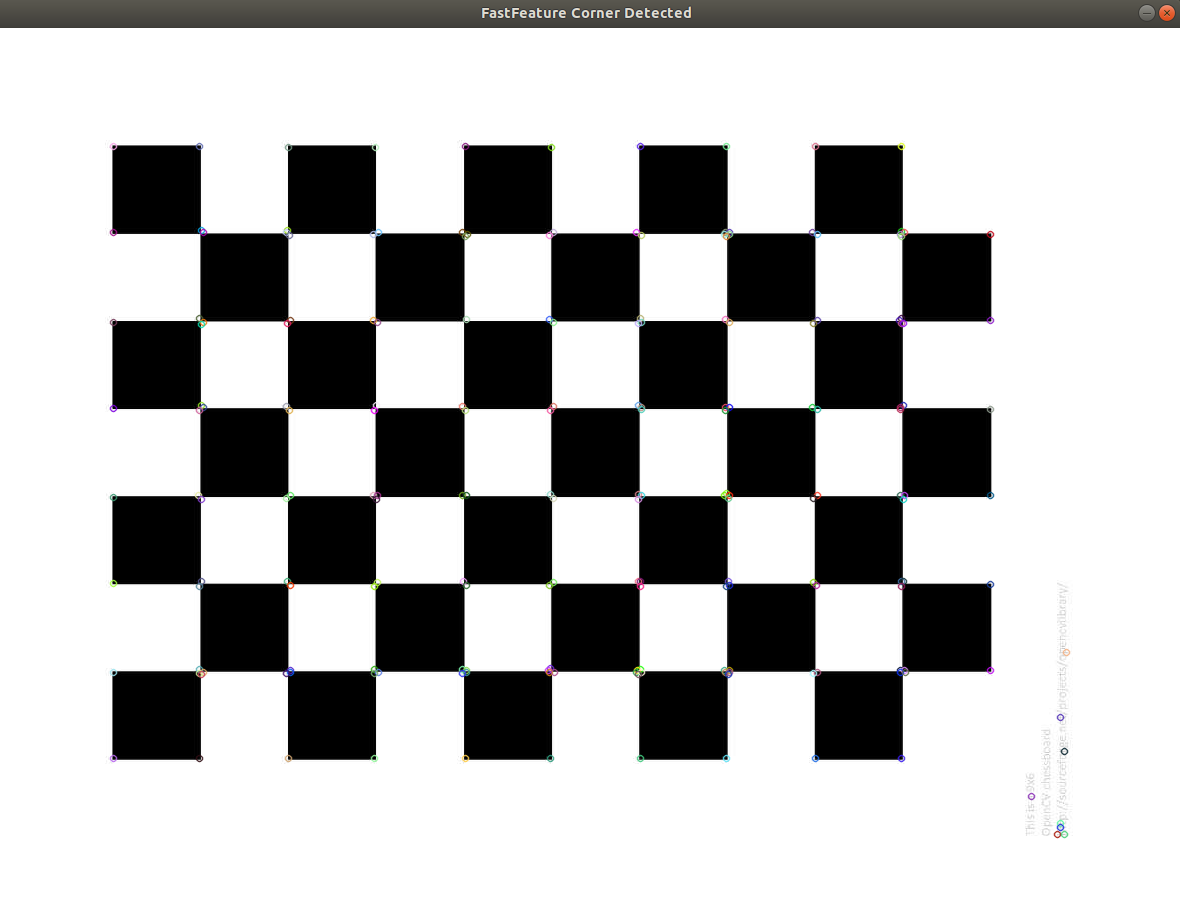
cv::imshow("FastFeature Corner Detected", dst);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.feature_detection.fast_feature_detector_test
参考源码:
Note
fast_feature_detector_test.h
fast_feature_detector.cpp
fast_feature_detector.h
4 SIFT角点检测¶
demo调用, 源码
TEST(SIFT, demo)
{
// 0008_roofs1.jpg
std::string filename = GetOpenCVDatasetDirectory() + "/0002_chessboard.jpeg";
SIFTFeature demo;
demo.RunDemo(filename);
}
函数使用:
void SIFTFeature::RunDemo(const std::string& filename)
{
cv::Mat image = cv::imread(filename, cv::IMREAD_GRAYSCALE);
cv::Mat color_img = cv::imread(filename);
if (image.data == nullptr || color_img.data == nullptr) {
std::cout << "Load image error." << filename << std::endl;
exit(-1);
}
cv::Mat float_img;
image.convertTo(float_img,CV_32F);
int rows = image.rows;
int cols = image.cols;
vl_sift_ = vl_sift_new(cols, rows, 4, 3, 0);
vl_sift_set_peak_thresh(vl_sift_, 0.04);
vl_sift_set_edge_thresh(vl_sift_, 10);
vl_sift_pix *data = (vl_sift_pix*)(float_img.data);
std::vector<VlSiftKeypoint> vlfeat_keypoints;
std::vector<cv::KeyPoint> opencv_keypoints;
std::vector<float*> descriptors;
ExtractFeature(vl_sift_,data, vlfeat_keypoints, descriptors);
ConvertToOpencvKeypoint(vlfeat_keypoints, opencv_keypoints);
drawKeypoints(image, opencv_keypoints, image);
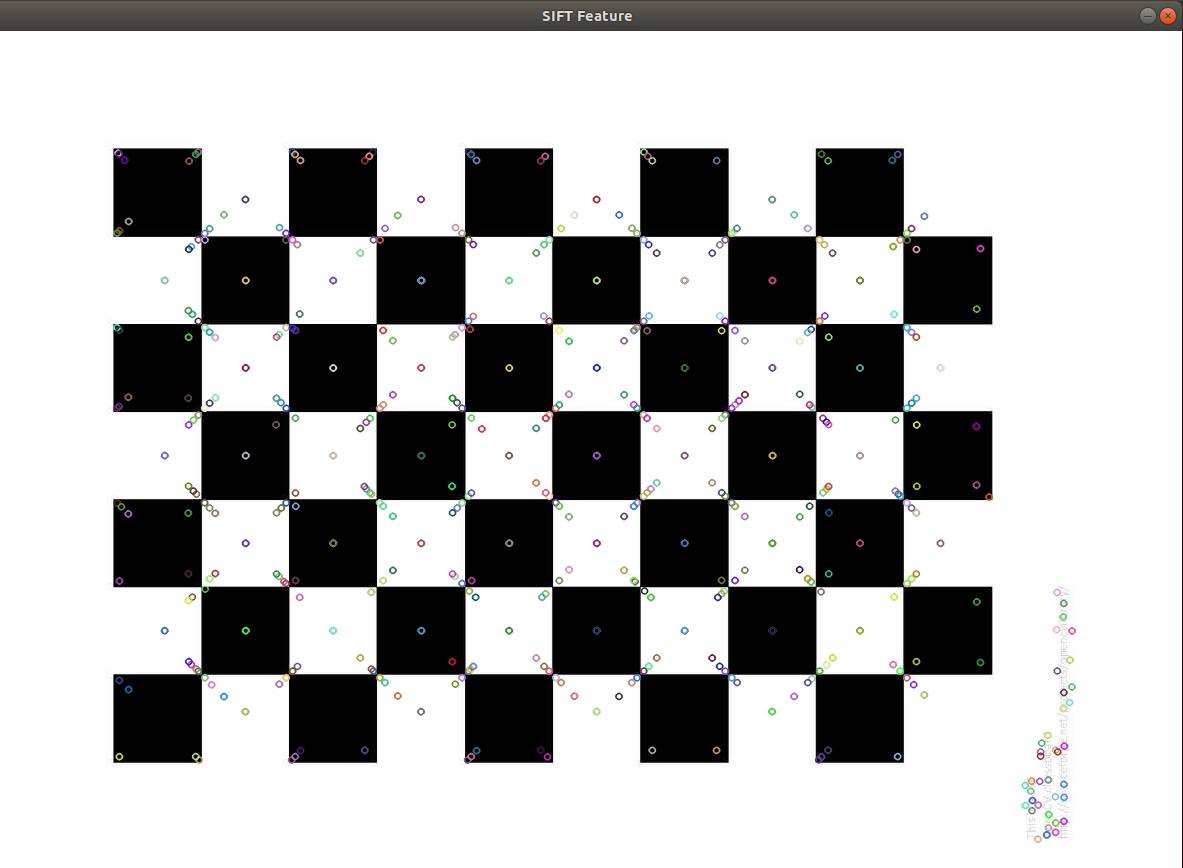
imshow("SIFT Feature", image);
cv::waitKey(0);
cv::destroyAllWindows();
vl_sift_delete(vl_sift_);
}
void SIFTFeature::ExtractFeature(VlSiftFilt* sift_ptr, vl_sift_pix* data,
std::vector<VlSiftKeypoint>& keypoints, std::vector<float*>& descriptors)
{
// Detect keypoint and compute descriptor in each octave
if(vl_sift_process_first_octave(vl_sift_, data) != VL_ERR_EOF)
{
while(true)
{
vl_sift_detect(vl_sift_);
VlSiftKeypoint* pKpts = vl_sift_->keys;
for(int i = 0; i < vl_sift_->nkeys; i ++)
{
double angles[4];
// 计算特征点的方向,包括主方向和辅方向,最多4个
int angleCount = vl_sift_calc_keypoint_orientations(vl_sift_, angles, pKpts);
// 对于方向多于一个的特征点,每个方向分别计算特征描述符
// 并且将特征点复制多个
for(int i = 0 ; i < angleCount; i ++)
{
float *des = new float[128];
vl_sift_calc_keypoint_descriptor(vl_sift_, des, pKpts, angles[0]);
descriptors.push_back(des);
keypoints.push_back(*pKpts);
}
pKpts ++;
}
// Process next octave
if(vl_sift_process_next_octave(vl_sift_) == VL_ERR_EOF)
{
break ;
}
}
}
}
void SIFTFeature::ConvertToOpencvKeypoint(
std::vector<VlSiftKeypoint>& vlfeat_keypoints,
std::vector<cv::KeyPoint>& opencv_keypoints)
{
for (auto keypoint : vlfeat_keypoints) {
opencv_keypoints.push_back({keypoint.x, keypoint.y, keypoint.sigma});
}
}
运行结果
[bin] ./xslam.opencv.feature_detection.SIFT_test
参考源码:
Note
SIFT_test.h
SIFT.cpp
SIFT.h
5 shi tomasi角点检测¶
Opencv C++ API:
void cv::goodFeaturesToTrack(InputArray _image, OutputArray _corners,
int maxCorners, double qualityLevel, double minDistance,
InputArray _mask, int blockSize,
bool useHarrisDetector, double harrisK)
Note
_image:8位或32位浮点型输入图像,单通道
_corners:保存检测出的角点
maxCorners:角点数目最大值,如果实际检测的角点超过此值,则只返回前maxCorners个强角点
qualityLevel:角点的品质因子
minDistance:对于初选出的角点而言,如果在其周围minDistance范围内存在其他更强角点,则将此角点删除
_mask:指定感兴趣区,如不需在整幅图上寻找角点,则用此参数指定ROI
blockSize:计算协方差矩阵时的窗口大小
useHarrisDetector:指示是否使用Harris角点检测,如不指定,则计算shi-tomasi角点
harrisK:Harris角点检测需要的k值
demo调用, 源码
TEST(ShiTomasi, GoodFeaturesToTrack)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0002_chessboard.jpeg";
ShiTomasi demo;
demo.CornerDetect(filename);
}
函数使用:
void ShiTomasi::CornerDetect(const std::string& filename)
{
cv::Mat image = cv::imread(filename);
if (image.data == nullptr) {
std::cout << "Load image error." << filename << std::endl;
exit(-1);
}
cv::Mat gray;
cv::cvtColor(image, gray,cv::COLOR_BGR2GRAY);
std::vector<cv::Point2f> corners;
goodFeaturesToTrack(gray, corners, 100, 0.01,50, cv::Mat());
for(int i = 0; i < corners.size(); i++) {
// image,背景图
// center,圆心
// radius,半径
// color,颜色
// thickness,线粗细
circle(image, corners[i],5,cv::Scalar(0,0,255),2);
}
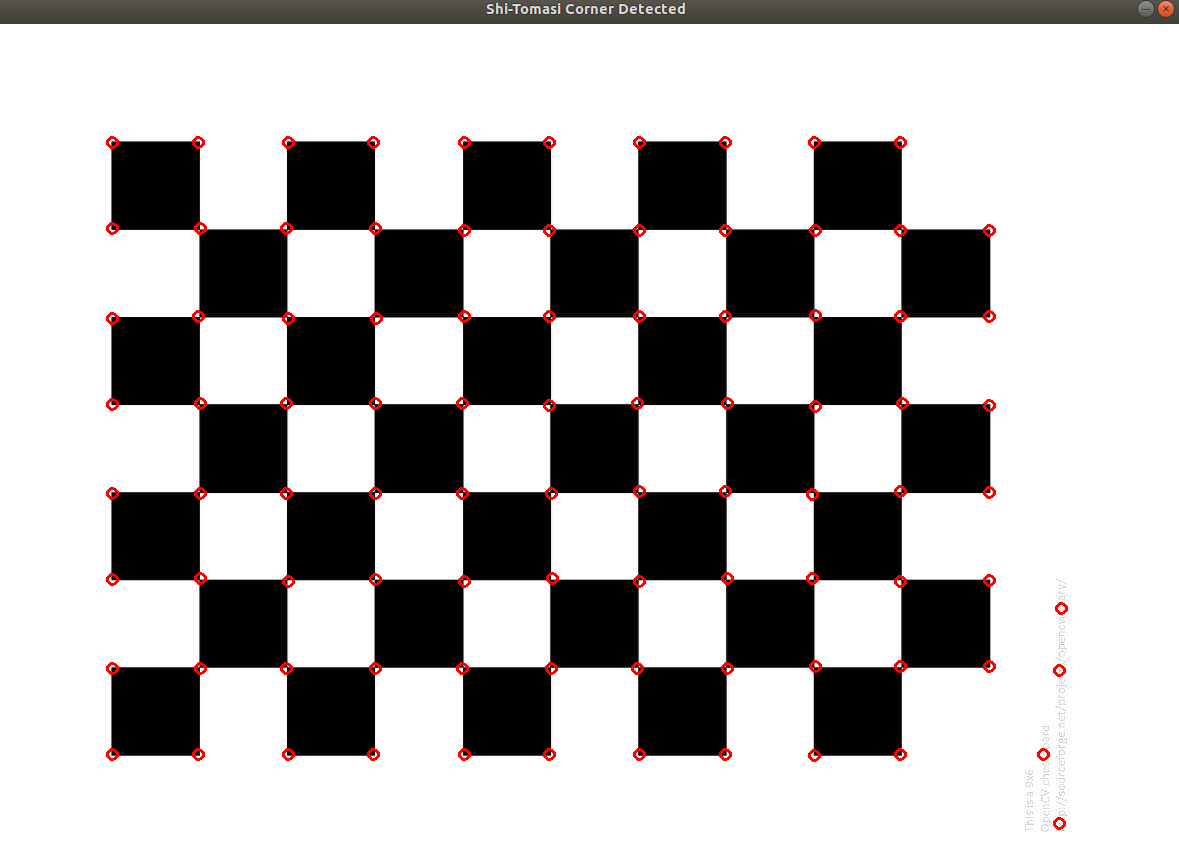
imshow("Shi-Tomasi Corner Detected",image);
cv::waitKey(0);
cv::destroyAllWindows();
}
运行结果
[bin] ./xslam.opencv.feature_detection.shi_tomasi_test
参考源码:
Note
shi_tomasi_test.h
shi_tomasi.cpp
shi_tomasi.h