Ceres Solver Tutorial¶
1 Installation¶
2 Tutorial¶
Hello World!¶
求取函数最小值:
\[\frac{1}{2}(10 -x)^2.\]
struct CostFunctor
{
template <typename T>
bool operator()(const T* const x, T* residual) const
{
residual[0] = T(10.0) - x[0];
return true;
}
};
// f(x) = 10 - x
void HelloWorld::RunDemo()
{
// The variable to solve for with its initial value. It will be
// mutated in place by the solver.
double x = 0.5;
const double initial_x = x;
// Build the problem.
::ceres::Problem problem;
// Set up the only cost function (also known as residual). This uses
// auto-differentiation to obtain the derivative (jacobian).
::ceres::CostFunction* cost_function =
new ::ceres::AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor);
problem.AddResidualBlock(cost_function, nullptr, &x);
// Run the solver!
::ceres::Solver::Options options;
options.minimizer_progress_to_stdout = true;
::ceres::Solver::Summary summary;
Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "x : " << initial_x << " -> " << x << "\n";
}
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time
0 4.512500e+01 0.00e+00 9.50e+00 0.00e+00 0.00e+00 1.00e+04 0 5.33e-04 3.46e-03
1 4.511598e-07 4.51e+01 9.50e-04 9.50e+00 1.00e+00 3.00e+04 1 5.00e-04 4.05e-03
2 5.012552e-16 4.51e-07 3.17e-08 9.50e-04 1.00e+00 9.00e+04 1 1.60e-05 4.09e-03
Ceres Solver Report: Iterations: 2, Initial cost: 4.512500e+01, Final cost: 5.012552e-16, Termination: CONVERGENCE
x : 0.5 -> 10
Footnotes
Curve Fitting¶
曲线函数 :
\[y = e^{mx + c}.\]
struct ExponentialResidual
{
public:
ExponentialResidual(double x, double y)
: x_(x), y_(y) {}
template <typename T>
bool operator()(const T* const m, const T* const c, T* residual) const
{
residual[0] = T(y_) - exp(m[0] * T(x_) + c[0]);
return true;
}
private:
// Observations for a sample.
const double x_;
const double y_;
};
void CurveFitting::RunDemo()
{
double m = 0.0;
double c = 0.0;
::ceres::Problem problem;
for (int i = 0; i < kNumObservations; ++i)
{
problem.AddResidualBlock(
new ::ceres::AutoDiffCostFunction<ExponentialResidual, 1, 1, 1>(
new ExponentialResidual(data[2 * i], data[2 * i + 1])),
NULL,
&m,
&c);
}
::ceres::Solver::Options options;
options.max_num_iterations = 25;
// QR Ax= b
options.linear_solver_type = ::ceres::DENSE_QR;
options.minimizer_progress_to_stdout = true;
// Result
::ceres::Solver::Summary summary;
::ceres::Solve(options, &problem, &summary);
std::cout << summary.BriefReport() << "\n";
std::cout << "Initial m: " << 0.0 << " c: " << 0.0 << "\n";
std::cout << "Final m: " << m << " c: " << c << "\n";
}
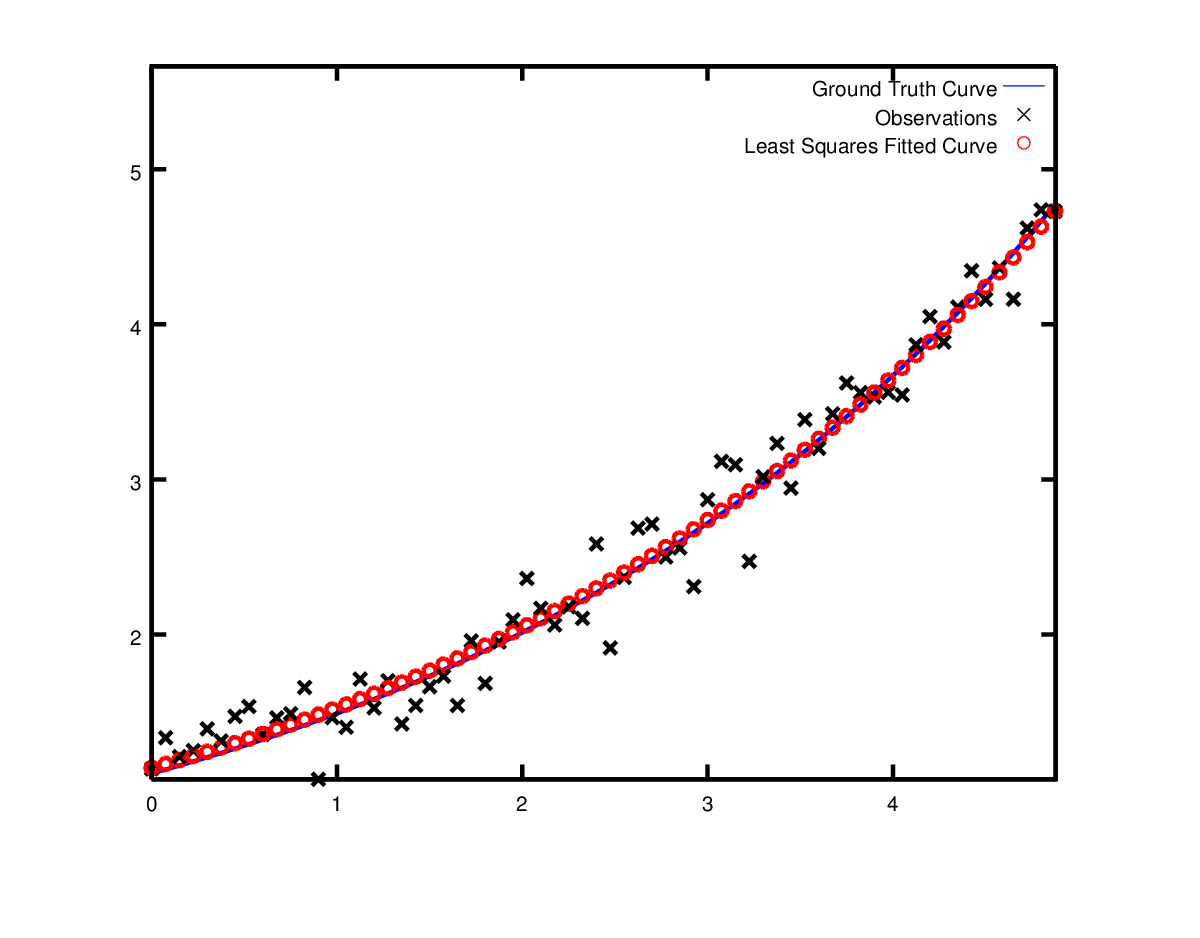
Least squares curve fitting.¶
Footnotes