System Initialization¶
相机初始化¶
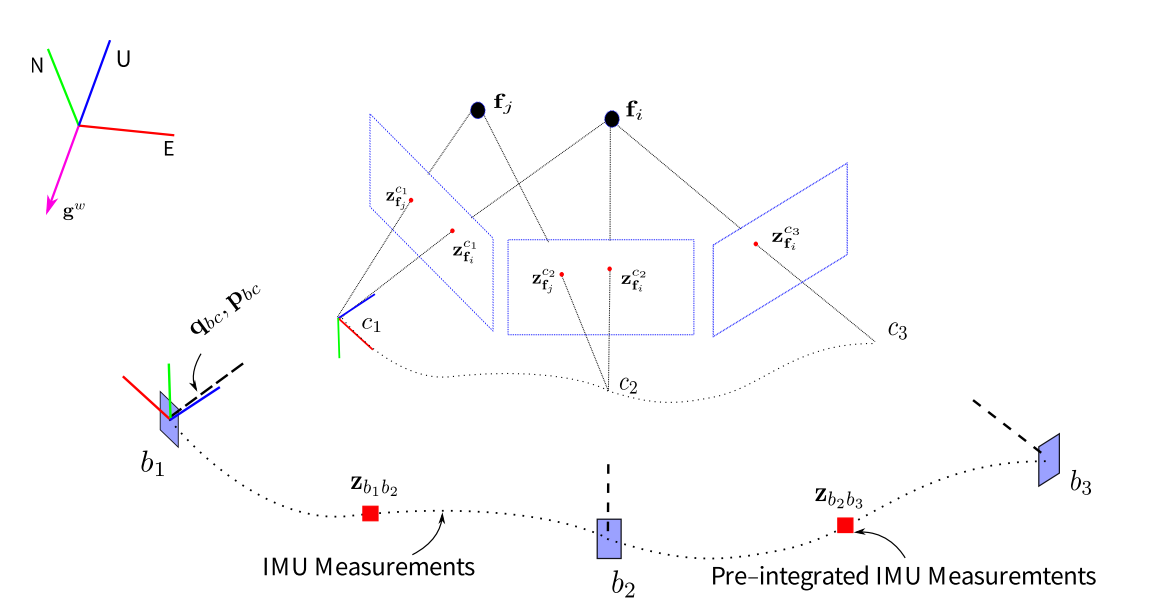
相机坐标系 \(c_0\) 为世界坐标系:
本体坐标系转换到 \(c_0\) 坐标系:
\[\begin{split}\begin{align}
q_{b_k}^{c_0} &= q_{c_k}^{c_0}\otimes (q_{c}^{b})^{-1} \\
sp_{b_k}^{c_0} &= s\bar{p}_{c_k}^{c_0} - R_{b_k}^{c_0}p_{c}^{b} \\
\end{align}\end{split}\]
其中参数 \(s\) 给视觉测量的位移赋予尺度信息。
初始化速度、重力向量和尺度因子
待优化的变量为:
\[\begin{split}\chi_{I} =
\begin{bmatrix}
\mathbf{v}_{b_0}^{b_0} \\
\mathbf{v}_{b_0}^{b_0} \\
\mathbf{v}_{b_0}^{b_0} \\
\vdots \\
\mathbf{v}_{b_0}^{b_0} \\
\mathbf{g}^{c_0} \\
s
\end{bmatrix}\end{split}\]
将预积分项广义的位置和速度中的世界坐标系 \(w\) 换为 \(c_0\) 坐标系:
\[\begin{split}\begin{align}
\alpha_{b_{k+1}}^{b_{k}} &=
R_{c_{0}}^{b_{k}}(\mathbf{p}_{b_{k+1}}^{c_0} -
\mathbf{p}_{b_{k}}^{c_0} -
\mathbf{\upsilon}_{b_{k}}^{c_0} \Delta{t_k} +
\frac{1}{2}\mathbf{g}^{c_0} \Delta{t_k}^2)
\\
\beta_{b_{k+1}}^{b_{k}} &=
R_{c_{0}}^{b_{k}}(\mathbf{v}_{b_{k+1}}^{c_0} -
\mathbf{\upsilon}_{b_{k}}^{c_0} +
\mathbf{g}^{c_0} \Delta{t_k})
\end{align}\end{split}\]
\(\mathbf{p}_{b_{k+1}}^{c_0}\) 和 \(\mathbf{p}_{b_{k}}^{c_0}\) 可由视觉 \(SFM\) 获得:
\[\begin{split}\begin{align}
\mathbf{p}_{b_{k}}^{c_0} &= s\bar{\mathbf{p}}_{b_{k}}^{c_0} \\
\mathbf{p}_{b_{k+1}}^{c_0} &=s\bar{\mathbf{p}}_{b_{k+1}}^{c_0}
\end{align}\end{split}\]
代入等式:
重力矢量的模长固定( \(g = 9.8 m/s^2\) ),其为2个自由度,在切空间上对其参数化
\[\begin{split}\begin{align}
\hat{g} &= ||g|| \cdot \bar{\hat{g}} + w_1 \vec{b_1} + w_2 \vec{b_2} \\
&= ||g|| \cdot \bar{\hat{g}} + B\vec{w}
\end{align} , \quad \quad B\in \mathbb{R}^{3\times2}, \vec{w} \in \mathbb{R}^{2\times1}\end{split}\]
令 \(\hat{g} = g^{c_0}\) , 将其代入上一小节公式得 :
\[\begin{split}\begin{align}
\begin{bmatrix}
-I\Delta{t}_k & 0 & \frac{1}{2}R_{c_0}^{b_k}\Delta{t}_{k}^2B & R_{c_0}^{b_k}(\bar{p}_{c_{k+1}^{c_0}} - \bar{p}_{c_{k}^{c_0}} ) \\
-I & R_{c_0}^{b_k}R_{b_{k+1}}^{c_0} & R_{c_0}^{b_k}\Delta{t}_{k}B & 0
\end{bmatrix}
\begin{bmatrix}
v_{b_k}^{b_k} \\
v_{b_{k+1}}^{b_{k+1}} \\
\vec{w} \\
s
\end{bmatrix}
\\
=
\begin{bmatrix}
\alpha_{b_{k+1}}^{b_k} - p_{c}^{b} + R_{c_0}^{b_k}R_{b_{k+1}}^{c_0} p_{c}^{b} - \frac{1}{2}R_{c_0}^{b_k} \Delta{t}_{k}^2 ||g||\cdot \bar{\hat{g}} \\
\beta_{b_{k+1}}^{b_k} - R_{c_0}^{b_k} \Delta{t}_{k} ||g||\cdot \bar{\hat{g}}
\end{bmatrix}
\end{align}\end{split}\]
\(IMU\) 测量残差
\(IMU\) 测量残差 \(r_B(\hat{\mathbf{Z}}^{b_{k}}_{b_{k+1}}, \mathbf{\chi})\) :
\[\begin{split}r_B(\hat{\mathbf{Z}}^{b_{k}}_{b_{k+1}}, \mathbf{\chi})
=
\begin{bmatrix}
\delta\alpha_{b_{k+1}}^{b_{k}} \\
\delta\theta_{b_{k+1}}^{b_{k}} \\
\delta\beta_{b_{k+1}}^{b_{k}} \\
\delta {\mathbf{b}}_{a} \\
\delta {\mathbf{b}}_{w} \\
\end{bmatrix}
=
\begin{bmatrix}
\mathbf{R}_{w}^{b_k}(\mathbf{p}_{b_{k+1}^{w}} - \mathbf{p}_{b_{k}^{w}} - \mathbf{\upsilon}_{b_{k}^{w}} \Delta{t_k} + \frac{1}{2}\mathbf{g}^w \Delta{t_k}^2) - \hat{\alpha}_{b_{k+1}}^{b_{k}} \\
2\begin{bmatrix}
(\hat{\mathbf{\gamma}}_{b_{k+1}}^{b_{k}})^{-1} \otimes \mathbf{q}_{b_{k}^{w}} \otimes \mathbf{q}_{b_{k+1}^{w}}
\end{bmatrix} \\
\mathbf{R}_{w}^{b_k}(\mathbf{\upsilon}_{b_{k+1}^{w}} - \mathbf{\upsilon}_{b_{k}^{w}} + \mathbf{g}^w \Delta{t_k}) - hat{\beta}_{b_{k+1}}^{b_{k}} \\
\mathbf{b}_{ab_{k+1}} - \mathbf{b}_{wb_{k}} \\
\mathbf{b}_{wb_{k+1}} - \mathbf{b}_{wb_{k}} \\
\end{bmatrix}\end{split}\]
对于两帧之间的 \(IMU\) 测量残差,优化变量为:
\[\underbrace{
\begin{bmatrix}
\mathbf{p}_{b_{k}}^{w}, \mathbf{\theta}_{b_{k}}^{w}
\end{bmatrix}
\quad
\begin{bmatrix}
\mathbf{v}_{b_{k}}^{w}, \mathbf{b}_{a_{k}}, \mathbf{b}_{w_{k}}
\end{bmatrix}
}_{k}
\quad
\underbrace{
\begin{bmatrix}
\mathbf{p}_{b_{k+1}}^{w}, \mathbf{\theta}_{b_{k+1}}^{w}
\end{bmatrix}
\quad
\begin{bmatrix}
\mathbf{v}_{b_{k+1}}^{w}, \mathbf{b}_{a_{k+1}}, \mathbf{b}_{w_{k+1}}
\end{bmatrix}
}_{k+1}\]
雅克比矩阵 \(jacobians\) :
\[\begin{split}J=
\begin{bmatrix}
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k}}^{w}} & \frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k}}^{w}} &
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k}}^{w}} & \frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k}}} &
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k}}} &
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k+1}}^{w}} & \frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k+1}}^{w}} &
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k+1}}^{w}} & \frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k+1}}} &
\frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k+1}}} \\
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k}}^{w}} & \frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k}}^{w}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k}}^{w}} & \frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k}}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k}}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k+1}}^{w}} & \frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k+1}}^{w}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k+1}}^{w}} & \frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k+1}}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k+1}}} \\
\frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k}}^{w}} & \frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k}}^{w}} &
\frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k}}^{w}} & \frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k}}} &
\frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k}}} &
\frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k+1}}^{w}} & \frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{\theta}_{b_{k+1}}^{w}} &
\frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{v}_{b_{k+1}}^{w}} & \frac{\partial{\delta\beta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{a_{k+1}}} &
\frac{\partial{\delta\theta_{b_{k+1}}^{b_{k}}}}{\mathbf{b}_{w_{k+1}}} \\
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{p}_{b_{k}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{\theta}_{b_{k}}^{w}} &
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{v}_{b_{k}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{b}_{a_{k}}} &
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{b}_{w_{k}}} &
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{p}_{b_{k+1}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{\theta}_{b_{k+1}}^{w}} &
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{v}_{b_{k+1}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{b}_{a_{k+1}}} &
\frac{\partial{\delta{\mathbf{b}}_{{a}}}}{\mathbf{b}_{w_{k+1}}} \\
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{p}_{b_{k}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{\theta}_{b_{k}}^{w}} &
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{v}_{b_{k}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{b}_{a_{k}}} &
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{b}_{w_{k}}} &
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{p}_{b_{k+1}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{\theta}_{b_{k+1}}^{w}} &
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{v}_{b_{k+1}}^{w}} & \frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{b}_{a_{k+1}}} &
\frac{\partial{\delta{\mathbf{b}}_{{w}}}}{\mathbf{b}_{w_{k+1}}}
\end{bmatrix}\end{split}\]
其中:
\[\begin{split}\begin{align} \frac{\partial{\delta\alpha_{b_{k+1}}^{b_{k}}}}{\mathbf{p}_{b_{k}}^{w}} &= \frac{\partial({\mathbf{R}_{w}^{b_k}(\mathbf{p}_{b_{k+1}}^{w} - \mathbf{p}_{b_{k}^{w}} - \mathbf{\upsilon}_{b_{k}^{w}} \Delta{t_k} + \frac{1}{2}\mathbf{g}^w \Delta{t_k}^2) - \hat{\alpha}_{b_{k+1}}^{b_{k}}})}{\partial{\mathbf{p}_{b_{k}}^{w}}} \\ &= -\mathbf{R}_{w}^{b_k} \end{align}\end{split}\]