Measurement Processing¶
前端视觉处理¶
自适应直方图均衡化(cv::CLAHE)
掩模处理,特征点均匀分布(setMask)
提取图像 Harris 角点(cv::goodFeaturesToTrack)
KLT 金字塔光流跟踪(cv::calcOpticalFlowPyrLK)
连续帧跟踪
基础矩阵 (RANSAC) 去除外点(rejectWithF)
发布去畸变的点 feature_points(id_of_point, un_pts, cur_pts, pts_velocity)
Note
Case 1: Rotation-compensated average feature parallax is larger than a threshold
Case 2: Number of tracked features in the current frame is less than a threshold
关键帧提取feature point
光流跟踪
特征点管理
IMU测量方程¶
忽略地球自转,IMU 测量方程为
\[\begin{split}\begin{align}
\hat{\mathbf{a}}_t &= \mathbf{a}_{t} + \mathbf{b}_{a_t} + \mathbf{R}_{w}^{t} \mathbf{g}^{w} + \mathbf{n}_{a} \\
\hat{\mathbf{w}}_t &= \mathbf{w}_{t} + \mathbf{b}_{w_t} + \mathbf{n}_{w}
\end{align}\end{split}\]
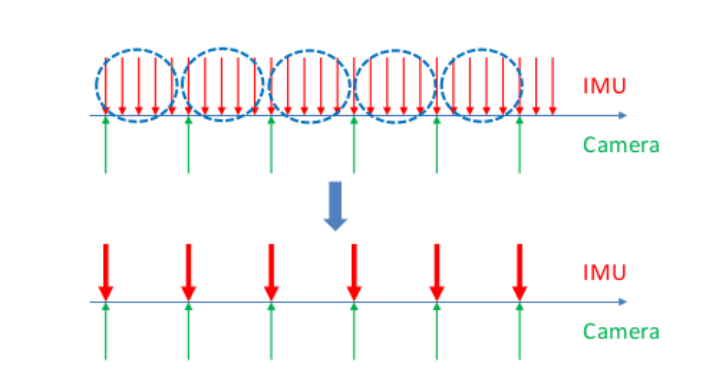
预积分方程¶
由上面的IMU测量方程积分就可以计算出下一时刻的 \(\mathbf{p}\)、 \(\mathbf{v}\) 和 \(\mathbf{q}\)
\[\begin{split}\begin{align}
\mathbf{p}_{b_{k+1}}^{w} &=
\mathbf{p}_{b_{k}}^{w} + \mathbf{v}_{b_{k}}^{w} \Delta t_{k} +
\iint_{t \in [t_{k}, t_{k+1}]} (\mathbf{R}_{t}^{w}
(\hat{\mathbf{a}}_t - \mathbf{b}_{a_t} - \mathbf{n}_{a}) - \mathbf{g}^{w})
dt^{2} \\
\mathbf{v}_{b_{k+1}}^{w} &=
\mathbf{v}_{b_{k}}^{w} +
\int_{t \in [t_{k}, t_{k+1}]} (\mathbf{R}_{t}^{w}
(\hat{\mathbf{a}}_t - \mathbf{b}_{a_t} - \mathbf{n}_{a}) - \mathbf{g}^{w}) _dt \\
\mathbf{q}_{b_{k+1}}^{w} &=
\mathbf{q}_{b_{k}}^{w} \otimes
\int_{t \in [t_{k}, t_{k+1}]}
\frac{1}{2} \Omega
(\hat{\mathbf{w}}_t - \mathbf{b}_{w_t} - \mathbf{n}_{w}) \mathbf{q}_{t}^{b_k}
dt
\end{align}\end{split}\]
其中(Hamilton四元数左乘矩阵,实部在最后)
\[\begin{split}\Omega(\mathbf{w}) =
\begin{bmatrix}
w \\
0
\end{bmatrix}_{R} =
\begin{bmatrix}
-w_{\times} & w \\
-w^{T} & 0
\end{bmatrix}_{R},
\qquad w_{\times} =
\begin{bmatrix}
0 & -w_z & w_y \\
w_z & 0 & -w_x \\
-w_y & w_x & 0
\end{bmatrix}\end{split}\]
误差状态方程¶
误差状态方程:
\[\delta{X}_{k+1} = (\mathbf{I} + \mathbf{F}\delta{t})\delta{X}_{k} + (\mathbf{G}\delta{t})\mathbf{n}\]
展开得 :
\[\begin{split}\underbrace
{
\begin{bmatrix}
\delta\alpha_{k+1} \\
\delta\theta_{k+1} \\
\delta\beta_{k+1} \\
\delta{b_a}_{k+1} \\
\delta{b_g}_{k+1}
\end{bmatrix}
}_{\delta{X}_{k+1}}
=
\underbrace
{
\begin{bmatrix}
I & \mathbf{f}_{01} & \delta{\mathbf{t}} & -\frac{1}{4}(q_k + q_{k+1}\delta{t^2}) & \mathbf{f}_{04} \\
0 & I - [\frac{w_{k} + w_{k+1}}{2} - b_{wk}]_{\times}\delta{t} & 0 & 0 & -\delta{t} \\
0 & \mathbf{f}_{21} & I & -\frac{1}{2}(q_k + q_{k+1}\delta{t}) & \mathbf{f}_{24}\\
0 & 0 & 0 & I & 0 \\
0 & 0 & 0 & 0 & I
\end{bmatrix}
}_{\mathbf{I} + \mathbf{F}\delta{t}}
\underbrace
{
\begin{bmatrix}
\delta\alpha_{k} \\
\delta\theta_{k} \\
\delta\beta_{k} \\
\delta{b_a}_{k} \\
\delta{b_g}_{k}
\end{bmatrix}
}_{\delta{X}_{k}}
+ \\
\underbrace
{
\begin{bmatrix}
\frac{1}{4}q_k\delta{t}^2 & v_{01} & \frac{1}{4}q_{k+1}\delta{t}^2 & v_{03} & 0 & 0 \\
0 & \frac{1}{2}\delta{t} & 0 & \frac{1}{2}\delta{t} & 0 & 0\\
\frac{1}{2}q_k \delta{t} & v_{21} & \frac{1}{2}{q_k+1}\delta{t} & v_{23} & 0 & 0 \\
0 & 0 & 0 & 0 & \delta{t} & 0 \\
0 & 0 & 0 & 0 & 0 & \delta{t}
\end{bmatrix}
}_{\mathbf{G}\delta{t}}
\underbrace
{
\begin{bmatrix}
n_{a0} \\
n_{w0} \\
n_{a1} \\
n_{w1} \\
n_{ba} \\
n_{bg}
\end{bmatrix}
}_{\mathbf{n}}\end{split}\]
其中:
\[\begin{split}\begin{cases}
\begin{align}
\mathbf{f}_{01} &= -\frac{1}{4}(-q_{k}[a_{k} - b_{ak}]_{\times}\delta{t}^2)\delta{t} - \frac{1}{4}(q_{k+1}[a_{k+1} - b_{ak}]_{\times}(\mathbf{I} - [\frac{w_{k+1} + w_{k}}{2} - b_{gk}]_{\times}\delta{t})\delta{t}^2 \\
\mathbf{f}_{21} &= -\frac{1}{2}(-q_{k}[a_{k} - b_{ak}]_{\times}\delta{t})\delta{t} - \frac{1}{2}(q_{k+1}[a_{k+1} - b_{ak}]_{\times}(\mathbf{I} - [\frac{w_{k+1} + w_{k}}{2} - b_{gk}]_{\times}\delta{t})\delta{t} \\
\mathbf{f}_{04} &= \frac{1}{4}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t}^2)(-\delta{t}) \\
\mathbf{f}_{24} &= \frac{1}{2}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t})(-\delta{t}) \\
v_{01} &= \frac{1}{4}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t}^2)\delta{t}\\
v_{03} &= \frac{1}{4}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t}^2)\frac{1}{2}\delta{t}\\
v_{21} &= \frac{1}{2}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t}^2)\frac{1}{2}\delta{t}\\
v_{23} &= \frac{1}{2}(-q_{k+1}[a_{k+1} - b_{ak}]_{\times}\delta{t}^2)\frac{1}{2}\delta{t}
\end{align}
\end{cases}\end{split}\]
integration_base.h 代码如下:
MatrixXd F = MatrixXd::Zero(15, 15);
F.block<3, 3>(0, 0) = Matrix3d::Identity();
F.block<3, 3>(0, 3) = -0.25 * delta_q.toRotationMatrix() * R_a_0_x * _dt * _dt +
-0.25 * result_delta_q.toRotationMatrix() * R_a_1_x *
(Matrix3d::Identity() - R_w_x * _dt) * _dt * _dt;
F.block<3, 3>(0, 6) = MatrixXd::Identity(3,3) * _dt;
F.block<3,3>(0,9) =-0.25(delta_q.toRotationMatrix()+result_delta_q.toRotationMatrix())*_dt*_dt;
F.block<3, 3>(0, 12) = -0.25 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * _dt * -_dt;
F.block<3, 3>(3, 3) = Matrix3d::Identity() - R_w_x * _dt;
F.block<3, 3>(3, 12) = -1.0 * MatrixXd::Identity(3,3) * _dt;
F.block<3, 3>(6, 3) = -0.5 * delta_q.toRotationMatrix() * R_a_0_x * _dt +
-0.5 *result_delta_q.toRotationMatrix() * R_a_1_x *(Matrix3d::Identity()-R_w_x * _dt)* _dt;
F.block<3, 3>(6, 6) = Matrix3d::Identity();
F.block<3, 3>(6, 9) = -0.5 * (delta_q.toRotationMatrix()+result_delta_q.toRotationMatrix())*_dt;
F.block<3, 3>(6, 12) = -0.5 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * -_dt;
F.block<3, 3>(9, 9) = Matrix3d::Identity();
F.block<3, 3>(12, 12) = Matrix3d::Identity();
MatrixXd V = MatrixXd::Zero(15,18);
V.block<3, 3>(0, 0) = 0.25 * delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 3) = 0.25 * -result_delta_q.toRotationMatrix() *R_a_1_x * _dt*_dt* 0.5 * _dt;
V.block<3, 3>(0, 6) = 0.25 * result_delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 9) = V.block<3, 3>(0, 3);
V.block<3, 3>(3, 3) = 0.5 * MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(3, 9) = 0.5 * MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(6, 0) = 0.5 * delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 3) = 0.5 * -result_delta_q.toRotationMatrix() * R_a_1_x * _dt * 0.5 * _dt;
V.block<3, 3>(6, 6) = 0.5 * result_delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 9) = V.block<3, 3>(6, 3);
V.block<3, 3>(9, 12) = MatrixXd::Identity(3,3) * _dt;
V.block<3, 3>(12, 15) = MatrixXd::Identity(3,3) * _dt;