Introduction¶
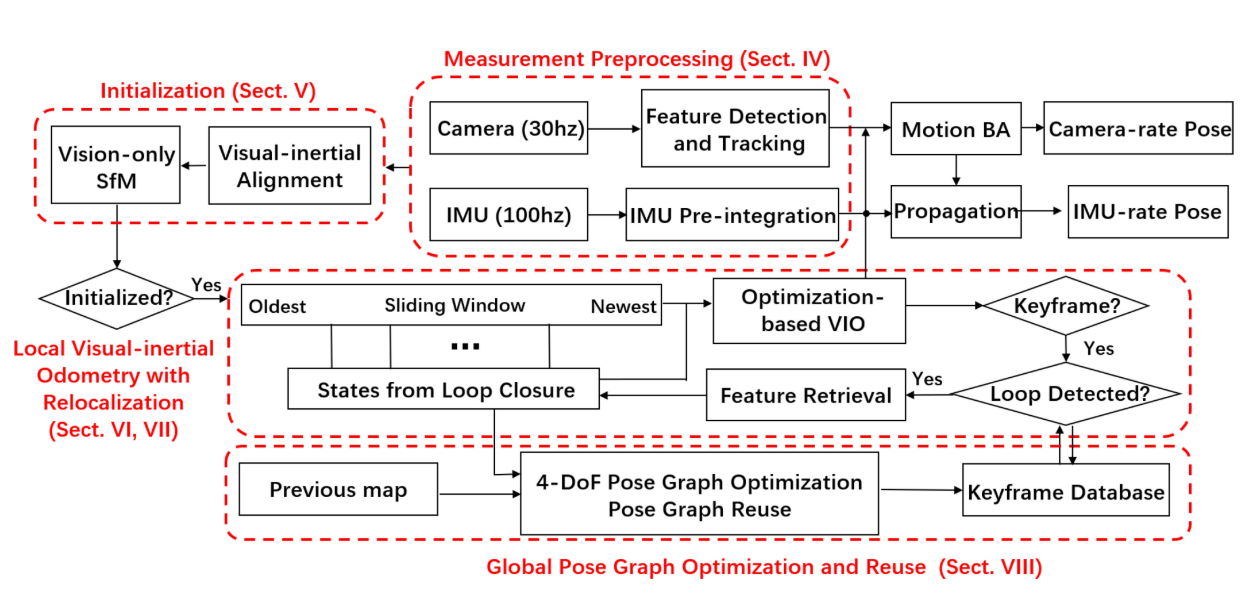
Monocular visual-inertial odometry with relocalization achieved via nonlinear graph optimization-based,tightly-coupled, sliding window, visual-inertial bundle adjustment.
Monocular visual-inertial odometry with relocalization achieved via nonlinear graph optimization-based,tightly-coupled, sliding window, visual-inertial bundle adjustment.