Quaternion¶

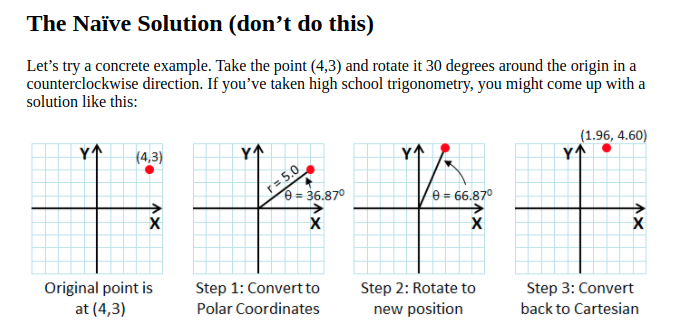
Rotating Points in Two-Dimensions

Euler Angle Visualization Tool



definition¶
\[\mathbf{q} = q_w + q_x + q_y + q_z\]
sum¶
\[\mathbf{p} + \mathbf{q} = \begin{bmatrix} p_w \ \mathbf{p}_v \end{bmatrix} +
\begin{bmatrix} q_w \ \mathbf{q}_v \end{bmatrix} =
\begin{bmatrix} p_w + q_w \ \mathbf{p}_v + \mathbf{q}_v \end{bmatrix} =
\begin{bmatrix} p_w + q_w \ \mathbf{p}_x + \mathbf{q}_x \ \mathbf{p}_y + \mathbf{q}_y \ \mathbf{p}_z + \mathbf{q}_z \end{bmatrix}\]
product¶
\[\begin{split}\begin{align}
\mathbf{p} \otimes \mathbf{q} &=
\begin{bmatrix}
p_w & \mathbf{p}_x & \mathbf{p}_y & \mathbf{p}_z
\end{bmatrix}
\otimes
\begin{bmatrix}
q_w & \mathbf{q}_x & \mathbf{q}_y & \mathbf{q}_z
\end{bmatrix} =
\begin{bmatrix}
p_w q_w -p_x q_x - p_y q_y -p_z q_z \\
p_w q_x +p_x q_w + p_y q_z -p_z q_y \\
p_w q_y -p_x q_y + p_y q_w +p_z q_x \\
p_w q_z +p_x q_z - p_y q_x +p_z q_w
\end{bmatrix}
\end{align}\end{split}\]
写成标量和向量形式:
\[\mathbf{p} \otimes \mathbf{q} =
\begin{bmatrix}
q_w & \mathbf{q}_x & \mathbf{q}_y & \mathbf{q}_z
\end{bmatrix} =
\begin{bmatrix}
p_w q_w - \mathbf{p}^T_v\mathbf{q}_v \ p_w \mathbf{q}_v + q_w \mathbf{p}_v +\mathbf{p}_v \times \mathbf{q}_v
\end{bmatrix}\]
四元数不满足交换律:
\[\mathbf{p} \otimes \mathbf{q} \ne \mathbf{q} \otimes \mathbf{p}\]
结合律:
\[(\mathbf{p} \otimes \mathbf{q}) \otimes \mathbf{r}= \mathbf{q} \otimes (\mathbf{p} \otimes \mathbf{r})\]
矩阵形式¶
\[\mathbf{q}_1 \otimes \mathbf{q}_2 = \mathbf{Q}^{+}\mathbf{q}_2 \ \mathbf{q}_1 \otimes \mathbf{q}_2 = \mathbf{Q}^{-}\mathbf{q}_1\]
where
\[\mathbf{Q}^{+} = q_w\mathbf{I} +
\begin{bmatrix}
0 & -\mathbf{q}_v^{T} \ \mathbf{q}_v & [\mathbf{q}*v]*{\times}
\end{bmatrix}
\quad\quad\quad\quad
\mathbf{Q}^{-} =
q_w\mathbf{I} +
\begin{bmatrix}
0 & -\mathbf{q}_v^{T} \ \mathbf{q}_v & -[\mathbf{q}*v]*{\times}
\end{bmatrix}\]
单位四元数¶
\[\mathbf{q}_{1} = 1 = \begin{bmatrix} 1 \ \mathbf{0}_x \end{bmatrix}\]
四元数共轭¶
\[\mathbf{q}^{\star} \triangleq q_w - \mathbf{q}_v =
\begin{bmatrix}
q_w \ - \mathbf{q}_v
\end{bmatrix}\]
四元数的模¶
\[\mathbf{q}| = \sqrt{q_w^2 + q_x^2 + q_y^2 + q_z^2}\]
四元数的逆¶
\[\mathbf{q} \otimes \mathbf{q}^{-1} = \mathbf{q}^{-1} \otimes \mathbf{q} = \mathbf{q}_{1}\]
旋转表示¶
\[\mathbf{q}({\theta}) =
\cos{\frac{\theta}{2}} + \mathbf{u}\sin{\frac{\theta}{2}} =
\begin{bmatrix}
cos{\frac{\theta}{2}}\ \mathbf{u}\sin{\frac{\theta}{2}}
\end{bmatrix}\]
向量旋转¶
\[\begin{bmatrix}
0 & \mathbf{v}^{\prime}
\end{bmatrix} =
\mathbf{q} \otimes
\begin{bmatrix}
0 & \mathbf{v}
\end{bmatrix} \otimes
\mathbf{q}^{\star}\]
旋转矩阵¶
\[\mathbf{v}^{\prime} = \mathbf{R}\mathbf{v}\]
where:
\[\begin{split}\mathbf{R}{q} =
\begin{bmatrix}
q_w^2 + q_x^2 - q_y^2 - q_z^2 & 2(q_xq_y - q_wq_z) & 2(q_xq_z + q_wq_y) \\
2(q_xq_y + q_wq_z) & q_w^2 - q_x^2 + q_y^2 - q_z^2 & 2(q_yq_z - q_wq_x) \\
2(q_xq_z - q_wq_y) & 2(q_yq_z + q_wq_x) & q_w^2 - q_x^2 - q_y^2 + q_z^2
\end{bmatrix}\end{split}\]
导数¶
\[\mathbf{\dot{q}} = \frac{1}{2} \mathbf{q} \otimes \mathbf{w}\]