Solve Ax = b Equation¶
Cholesky factorization solve Ax = b¶
LU factorization solve Ax = b¶
QR factorization solve Ax = b¶
SVD factorization solve Ax = b¶
SVD的数学涵义
矩阵在线性代数系统中是一个核心的概念, 其从不同的角度出发都能拥丰富的内涵。
矩阵 \(A\) 是线性方程组 \(Ax=b\) 的系数组成的矩阵, 其每一行是 \(Ax=b\) 中每一个方程式的系数部分, 通过分析矩阵的秩 \(rank(A)\) 和其极大线性无关组的情况, 我们可以了解方程的解的情况, 同时, 对于使用高斯消元法等进行求解也比较方便;
当 \(m \ge n \cap rank(A) = n\) 时, 矩阵 \(A\) 是 \(\mathbb R^{n}\) 空间中的一个基, 在这个基上面, 有向量 \(\vec{x} = [x_1, x_2, \cdots, x_n]\), 而此向量在标准正交基上表示为 \(\vec{b} = [b_1, b_2, \cdots, b_n]\), 此时 \(Ax=b\) 隐含着一个基变换的关系, 即 \(Ax = Ib\), \(I\) 为标准正交基;
矩阵 \(A\) 本身表示一个线性变换, (线性方程组 \(Ax=b\) 表示其对向量 \(\vec{x}\) 进行线性变换得到向量 \(\vec{b}\) 的过程.
上述的关于矩阵的各种角色与我们阐述SVD有什么关系呢? 当我们将矩阵视为一种线性变换时, SVD可以帮我们揭示组成该线性变换的最本质的变换, 具体地, SVD揭示了这样的一个事实: 对于任意的矩阵 \(A\) , 我们总能找到一组单位正交基, 使得 \(A\) 对其进行变换之后, 得到的向量组仍然是正交的. 这样的表述还是相当地晦涩, 我们不妨在二维平面中举一个例子.
设有矩阵 \(A\) , 其对单位正交基 \(\vec{v}_1, \vec{v}_2\) 进行线性变换, 得到的向量仍然是彼此正交的, 即 \(A\vec{v}_1, A\vec{v}_2\) 仍然是正交的. 设 \(A\vec{v}_1, A\vec{v}_2\) 方向上的单位向量是 \(\vec{\mu}_1, \vec{\mu}_2\) , 长度是 \(\sigma_1, \sigma_2\) , 则我们可得
现在利用矩阵 \(A\) 对向量 \(\vec{x}\) 进行线性变换. 我们先将向量 \(\vec{x}\) 在单位正交基 \(\vec{v}_1, \vec{v}_2\) 上进行表示, 即
因此
至此, 我们由”对于任意的矩阵 \(A\) , 我们总能找到一组单位正交基, 使得 \(A\) 对其进行变换之后, 得到的向量组仍然是正交的”, 得到了矩阵 \(A\) 最终的分解形式 \(A = \mathbf{U} \mathbf{\Sigma} \mathbf{V}^{T}\) 。 对于任意的矩阵 \(A\) , 我们总可以将其分解为一个酉矩阵 \(U\), 一个对角矩阵 \(\mathbf{\Sigma}\) 和另一个酉矩阵的转置 \(\mathbf{V}^{T}\) 的乘积, 这便是SVD的核心内容.
SVD的几何涵义
现在我们知道, 对于任意的矩阵 \(A\) , 我们总可以将其分解为一个酉矩阵 \(U\) , 一个对角矩阵 \(\Sigma\) 和另一个酉矩阵的转置 \(V^{T}\) 的乘积, 即等式 \(A = \mathbf{U} \mathbf{\Sigma} \mathbf{V}^{T}\) 所表述的内容. \(A = \mathbf{U} \mathbf{\Sigma} \mathbf{V}^{T}\) 表示矩阵 \(A\) 所代表的线性变换可以由更简单的旋转, 拉伸变换进行合成. 这些更简单的变换是怎么进行生效的呢? 我们还是在二维平面中举例说明.
当使用矩阵 \(A\) 对向量 \(\vec{x}\) 进行变化时, 我们可以先将向量 \(\vec{x}\) 在单位正交基 \(\vec{v}_1, \vec{v}_2\) 上进行表示, 我们不妨令 \(\xi_1 = v_1^T \vec{x}, \xi_2 = v_2^T \vec{x}\) , 则 \(\xi_1, \xi_2\) 是向量 \(\vec{x}\) 在单位正交基 \(\vec{v}_1, \vec{v}_2\) 上的坐标, 即
因此
分析矩阵的具体操作效果

如(9)所示, 矩阵 \(A\) 对向量 \(\vec{x}\) 进行线性变换, 其先将向量 \(\vec{x}\) 用单位正交基 \(V\) 进行表示. 然后使用酉矩阵 \(V^T\) 进行旋转, 由酉矩阵的性质我们可知 \(VV^T = V^TV = I \) . 然后使用矩阵 \(\Sigma\) 进行拉伸, 使得 \(x-axis, y-axis\) 分别拉伸 \(\sigma_1, \sigma_2\) 倍的长度. 最后再使用酉矩阵 \(U\) 对拉伸之后的正交基进行旋转, 得到最终的基, 从而得到最终的向量为
上述过程可表示为下图
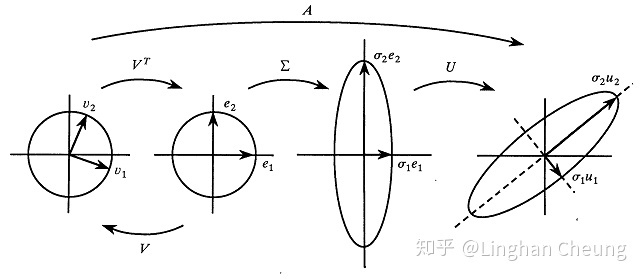
通过SVD, 我们找到了能代表矩阵 \(A\) 作为线性变换时最本质的操作. 而 \(\sigma_1, \sigma_2\) 就是所谓的奇异值, 表示对标准正交基各个轴进行拉伸的程度.
SVD的求解过程