Pinhole Model¶
齐次坐标¶
在原有的坐标上增加一个维度:
\[\begin{split}\begin{bmatrix}
x \\
y
\end{bmatrix}
\rightarrow
\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
\qquad
\begin{bmatrix}
x \\
y
\end{bmatrix}
\rightarrow
\begin{bmatrix}
x \\
y \\
z \\
1
\end{bmatrix}\end{split}\]
新增的维度并不会增加自由度:
\[(x, y, z, w) \quad w \neq 0 \longrightarrow (\frac{x}{w}, \frac{y}{w}, \frac{z}{w})\]
使用齐次坐标判断点是否在线上:
\[\begin{split}\mathbf{l} =
\begin{bmatrix}
l_1 \\
l_2 \\
l_3
\end{bmatrix}
\qquad \qquad
\mathbf{x}^{T} \mathbf{l} =
\begin{bmatrix}
u & v & 1
\end{bmatrix}
\begin{bmatrix}
l_1 \\
l_2 \\
l_3
\end{bmatrix}
= 0\end{split}\]
使用齐次坐标判断点是否在平面上:
\[\begin{split}\mathbf{\pi} =
\begin{bmatrix}
n_1 \\
n_2 \\
n_3 \\
d
\end{bmatrix}
\qquad \qquad
\mathbf{x}^{T} \mathbf{\pi} =
\begin{bmatrix}
x & y & z & 1
\end{bmatrix}
\begin{bmatrix}
n_1 \\
n_2 \\
n_3 \\
d
\end{bmatrix}
= 0\end{split}\]
两个点定义一条直线:
\[\mathbf{I} = \mathbf{p} \times \mathbf{q}\]
两条直线定义一个点:
\[\mathbf{x} = \mathbf{I} \times \mathbf{m}\]
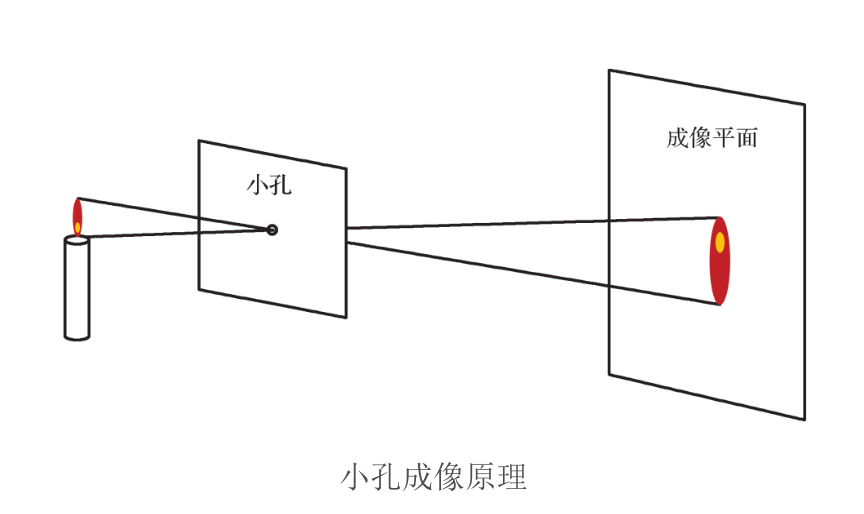
针孔相机模型¶
针孔成像模型是一个理想的透视投影变换,将三维空间点变换为图像空间的像素点
相机坐标系与像平面坐标系间的关系
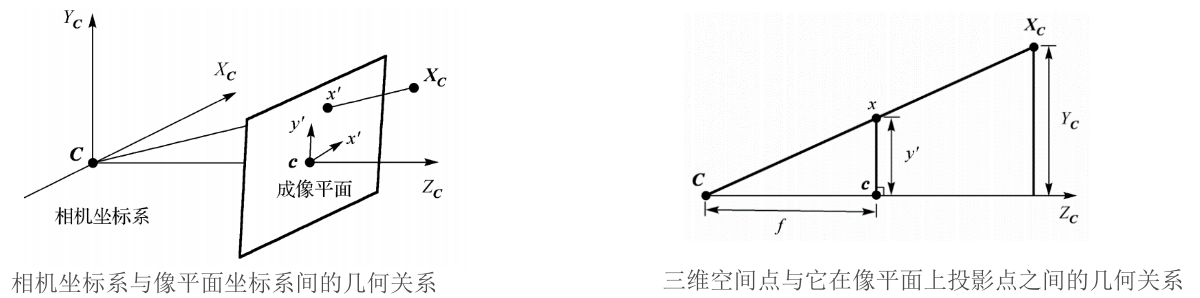
投影方程:
\[\begin{split}\begin{bmatrix}
x_{'} \\
y_{'} \\
f
\end{bmatrix}
\backsim
\begin{bmatrix}
X_{C} \\
Y_{C} \\
Z_{C}
\end{bmatrix}\end{split}\]
齐次坐标表示:
\[\begin{split}\begin{bmatrix}
x_{'} \\
y_{'} \\
f
\end{bmatrix}
\backsim
\begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & 1 & 0 & 0 \\
0 & 0 & 1 & 0
\end{bmatrix}
\begin{bmatrix}
X_{C} \\
Y_{C} \\
Z_{C} \\
1
\end{bmatrix}\end{split}\]
内参矩阵¶
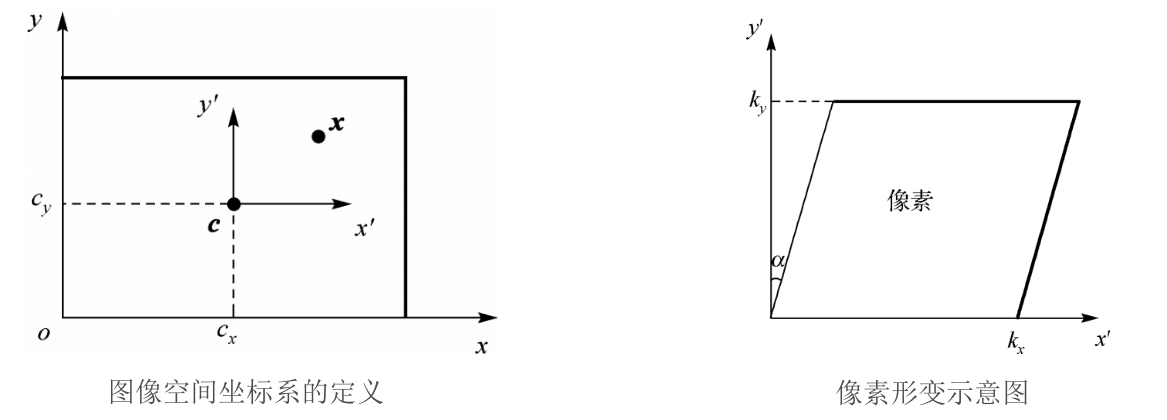
齐次坐标表示:
\[\begin{split}\begin{bmatrix}
x \\
y \\
1
\end{bmatrix}
=
\begin{bmatrix}
f_x & 0 & c_x \\
0 & f_y & c_y \\
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
x_{'} \\
y_{'} \\
f
\end{bmatrix}\end{split}\]
外参矩阵¶
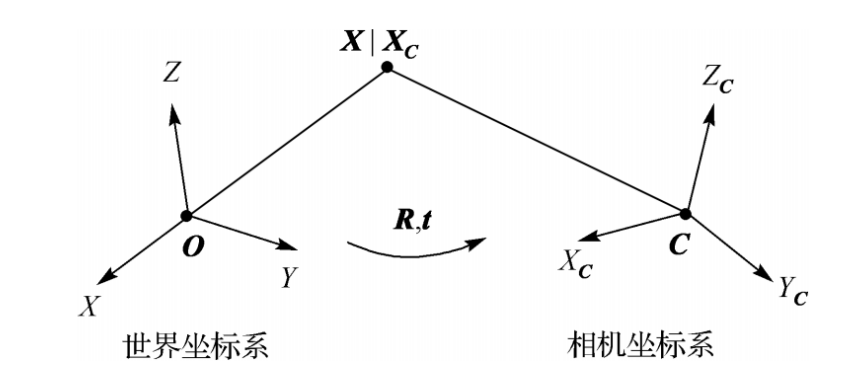
\[\mathbf{X} =
\begin{bmatrix}
R & \mathbf{t}
\end{bmatrix}
=
\hat{\mathbf{X}}
\begin{bmatrix}
R & -R\tilde{C}
\end{bmatrix}
\hat{\mathbf{X}}\]
透视相机模型
\[\mathbf{P} =
\mathbf{K}
\begin{bmatrix}
\mathbf{R} & \mathbf{t}
\end{bmatrix}\]
Note
11个自由度(5 + 3 + 3)
5个内参
3个旋转角度
3个平移
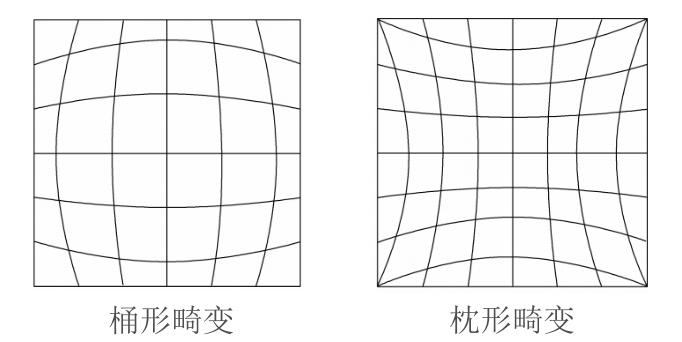
径向畸变¶
切向畸变¶
Note
切向畸变主要是由于透镜和成像平面不严格平行造成的
\[\begin{split}\begin{align}
x_d^{\prime} &= x^{\prime}(1 + \kappa_1 r^2 + \kappa_2 r^4 + \cdots ) + 2p_1x^{\prime}y^{\prime} + p_2(r^2 + 2{x^{\prime}}^2) \\
y_d^{\prime} &= y^{\prime}(1 + \kappa_1 r^2 + \kappa_2 r^4 + \cdots ) + p_1(r^2 + 2{y^{\prime}}^{2}) + 2p_2{x^{\prime}}y^{\prime}
\end{align}\end{split}\]