Video Analysis¶
1 Camshift¶
Opencv C++ API:
RotatedRect CamShift(InputArray probImage, Rect& window, TermCriteria criteria)
Note
probImage: Back projection of the object histogram. See calcBackProject()
window: Initial search window
riteria: Stop criteria for the underlying meanShift()
demo调用, 源码
TEST(Camshift, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/cup.mp4";
Camshift demo;
demo.RunDemo(filename);
}
函数使用:
void Camshift::RunDemo(const std::string& filename)
{
VideoCapture capture(filename);
if (!capture.isOpened()){
//error in opening the video input
cerr << "Unable to open file!" << endl;
}
Mat frame, roi, hsv_roi, mask;
// take first frame of the video
capture >> frame;
// setup initial location of window
Rect track_window(300, 200, 100, 50); // simply hardcoded the values
// set up the ROI for tracking
roi = frame(track_window);
cvtColor(roi, hsv_roi, COLOR_BGR2HSV);
inRange(hsv_roi, Scalar(0, 60, 32), Scalar(180, 255, 255), mask);
float range_[] = {0, 180};
const float* range[] = {range_};
Mat roi_hist;
int histSize[] = {180};
int channels[] = {0};
calcHist(&hsv_roi, 1, channels, mask, roi_hist, 1, histSize, range);
normalize(roi_hist, roi_hist, 0, 255, NORM_MINMAX);
// Setup the termination criteria, either 10 iteration or move by atleast 1 pt
TermCriteria term_crit(TermCriteria::EPS | TermCriteria::COUNT, 10, 1);
while(true){
Mat hsv, dst;
capture >> frame;
if (frame.empty())
break;
cvtColor(frame, hsv, COLOR_BGR2HSV);
calcBackProject(&hsv, 1, channels, roi_hist, dst, range);
// apply camshift to get the new location
RotatedRect rot_rect = CamShift(dst, track_window, term_crit);
// Draw it on image
Point2f points[4];
rot_rect.points(points);
for (int i = 0; i < 4; i++)
line(frame, points[i], points[(i+1)%4], 255, 2);
imshow("img2", frame);
int keyboard = waitKey(30);
if (keyboard == 'q' || keyboard == 27)
break;
}
}
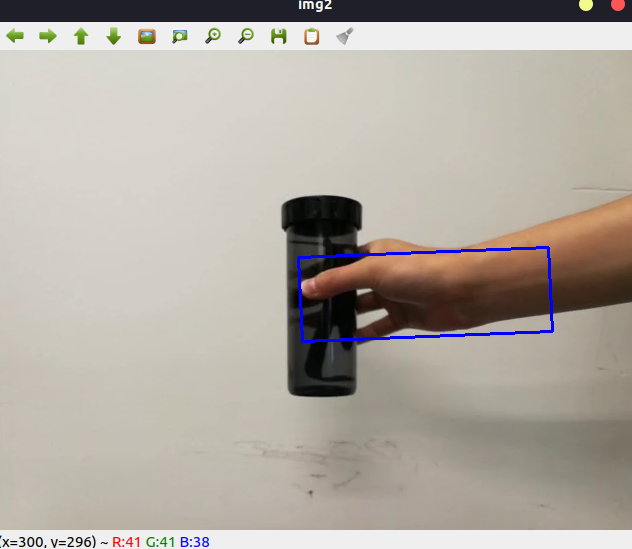
运行结果
[bin] ./xslam.opencv.video_analysis.cam_shift_test
参考源码:
Note
cam_shift_test.cpp
cam_shift.cpp
cam_shift.h
2 Meanshift¶
Opencv C++ API:
int meanShift( InputArray probImage, CV_OUT CV_IN_OUT Rect& window, TermCriteria criteria );
Note
probImage:概率分布图像,可以是目标直方图的反向投影(见 cvCalcBackProject)
Window:初始搜索窗口,可以是使用Rect定义ROI
Criteria:确定窗口搜索停止的准则,OpenCV实现该算法时定义了两个停止条件:迭代次数达到设置的最大值;窗口中心的漂移值小于某个设定的限值。
demo调用, 源码
TEST(Meanshift, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/slow_traffic_small.mp4";
Meanshift demo;
demo.RunDemo(filename);
}
函数使用:
void Meanshift::RunDemo(const std::string& filename)
{
VideoCapture capture(filename);
if (!capture.isOpened()){
//error in opening the video input
cerr << "Unable to open file!" << endl;
}
Mat frame, roi, hsv_roi, mask;
// take first frame of the video
capture >> frame;
// setup initial location of window
Rect track_window(300, 200, 100, 50); // simply hardcoded the values
// set up the ROI for tracking
roi = frame(track_window);
cvtColor(roi, hsv_roi, COLOR_BGR2HSV);
inRange(hsv_roi, Scalar(0, 60, 32), Scalar(180, 255, 255), mask);
float range_[] = {0, 180};
const float* range[] = {range_};
Mat roi_hist;
int histSize[] = {180};
int channels[] = {0};
calcHist(&hsv_roi, 1, channels, mask, roi_hist, 1, histSize, range);
normalize(roi_hist, roi_hist, 0, 255, NORM_MINMAX);
// Setup the termination criteria, either 10 iteration or move by atleast 1 pt
TermCriteria term_crit(TermCriteria::EPS | TermCriteria::COUNT, 10, 1);
while(true){
Mat hsv, dst;
capture >> frame;
if (frame.empty())
break;
cvtColor(frame, hsv, COLOR_BGR2HSV);
calcBackProject(&hsv, 1, channels, roi_hist, dst, range);
// apply meanshift to get the new location
meanShift(dst, track_window, term_crit);
// Draw it on image
rectangle(frame, track_window, 255, 2);
imshow("img2", frame);
int keyboard = waitKey(30);
if (keyboard == 'q' || keyboard == 27)
break;
}
}
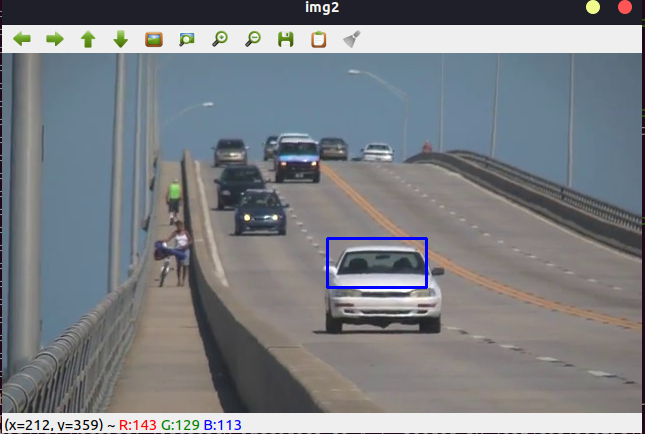
运行结果
[bin] ./xslam.opencv.video_analysis.mean_shift_test
参考源码:
Note
mean_shift_test.cpp
mean_shift.cpp
mean_shift.h
3 OpticalFlow¶
Opencv C++ API:
void cv::calcOpticalFlowPyrLK(
InputArray prevImg,
InputArray nextImg,
InputArray prevPts,
InputOutputArray nextPts,
OutputArray status,
OutputArray err,
Size winSize = Size(21, 21),
int maxLevel = 3,
TermCriteria criteria = TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 0.01),
int flags = 0,
double minEigThreshold = 1e-4
)
Note
prevImg :buildOpticalFlowPyramid构造的第一个8位输入图像或金字塔。
nextImg :与prevImg相同大小和相同类型的第二个输入图像或金字塔
prevPts :需要找到流的2D点的矢量(vector of 2D points for which the flow needs to be found;);点坐标必须是单精度浮点数。
nextPts :输出二维点的矢量(具有单精度浮点坐标),包含第二图像中输入特征的计算新位置;当传递OPTFLOW_USE_INITIAL_FLOW标志时,向量必须与输入中的大小相同。
status :输出状态向量(无符号字符);如果找到相应特征的流,则向量的每个元素设置为1,否则设置为0。
err :输出错误的矢量; 向量的每个元素都设置为相应特征的错误,错误度量的类型可以在flags参数中设置; 如果未找到流,则未定义错误(使用status参数查找此类情况)。
winSize :每个金字塔等级的搜索窗口的winSize大小。
maxLevel :基于0的最大金字塔等级数;如果设置为0,则不使用金字塔(单级),如果设置为1,则使用两个级别,依此类推;如果将金字塔传递给输入,那么算法将使用与金字塔一样多的级别,但不超过maxLevel。
criteria :参数,指定迭代搜索算法的终止条件(在指定的最大迭代次数criteria.maxCount之后或当搜索窗口移动小于criteria.epsilon时)。
- flags :操作标志:
OPTFLOW_USE_INITIAL_FLOW使用初始估计,存储在nextPts中;如果未设置标志,则将prevPts复制到nextPts并将其视为初始估计。
OPTFLOW_LK_GET_MIN_EIGENVALS使用最小特征值作为误差测量(参见minEigThreshold描述);如果没有设置标志,则将原稿周围的色块和移动点之间的L1距离除以窗口中的像素数,用作误差测量。
minEigThreshold :算法计算光流方程的2x2正常矩阵的最小特征值,除以窗口中的像素数;如果此值小于minEigThreshold,则过滤掉相应的功能并且不处理其流程,因此它允许删除坏点并获得性能提升
demo调用, 源码
TEST(OpticalFlow, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/slow_traffic_small.mp4";
OpticalFlow demo;
demo.RunDemo(filename);
}
函数使用:
void OpticalFlow::RunDemo(const std::string& filename)
{
cv::Mat image1, image2;
std::vector<cv::Point2f> point1, point2, pointCopy;
std::vector<uchar> status;
std::vector<float> err;
cv::VideoCapture video(filename);
video >> image1;
cv::Mat image1Gray, image2Gray;
cv::cvtColor(image1, image1Gray, cv::COLOR_RGB2GRAY);
cv::goodFeaturesToTrack(image1Gray, point1, 100, 0.01, 10, cv::Mat());
pointCopy = point1;
for (int i = 0; i < point1.size(); i++) //绘制特征点位
{
cv::circle(image1, point1[i], 1, cv::Scalar(0, 0, 255), 2);
}
cv::namedWindow("光流特征图");
while (true)
{
video >> image2;
if (cv::waitKey(33) == ' ') //按下空格选择当前画面作为标定图像
{
cv::cvtColor(image2, image1Gray, cv::COLOR_RGB2GRAY);
cv::goodFeaturesToTrack(image1Gray, point1, 100, 0.01, 10, cv::Mat());
pointCopy = point1;
}
cv::cvtColor(image2, image2Gray, cv::COLOR_RGB2GRAY);
cv::calcOpticalFlowPyrLK(image1Gray, image2Gray, point1, point2, status, err, cv::Size(50, 50), 3); // LK金字塔
int tr_num = 0;
auto status_itr = status.begin();
while (status_itr != status.end()) {
if (*status_itr > 0)
tr_num++;
status_itr++;
}
if (tr_num < 6) {
std::cout << "you need to change the feat-img because the background-img was all changed" << std::endl;
if (cv::waitKey(0) == ' ') {
cv::cvtColor(image2, image1Gray, cv::COLOR_RGB2GRAY);
cv::goodFeaturesToTrack(image1Gray, point1, 100, 0.01, 10, cv::Mat());
pointCopy = point1;
}
}
for (int i = 0; i < point2.size(); i++)
{
cv::circle(image2, point2[i], 1, cv::Scalar(0, 0, 255), 2);
cv::line(image2, pointCopy[i], point2[i], cv::Scalar(255, 0, 0), 2);
}
cv::imshow("光流特征图", image2);
std::swap(point1, point2);
image1Gray = image2Gray.clone();
}
}
运行结果
[bin] ./xslam.opencv.video_analysis.optical_flow_test

参考源码:
Note
optical_flow_test.cpp
optical_flow.cpp
optical_flow.h
4 buildOpticalFlowPyramid¶
Opencv C++ API:
int cv::buildOpticalFlowPyramid (
InputArray img,
OutputArrayOfArrays pyramid,
Size winSize,
int maxLevel,
bool withDerivatives = true,
int pyrBorder = BORDER_REFLECT_101,
int derivBorder = BORDER_CONSTANT,
bool tryReuseInputImage = true)
Note
img 8位输入图像
pyramid 输出金字塔
winSize 光流算法的窗口大小。 必须不少于calcOpticalFlowPyrLK的winSize参数。 需要计算金字塔级别所需的填充。
maxLevel 从0开始的最大金字塔等级编号。
withDerivatives 设置为每个金字塔等级预计算梯度。 如果金字塔是在没有梯度的情况下构建的,那么calcOpticalFlowPyrLK将在内部对其进行计算。
pyrBorder 金字塔图层的边框模式。
derivBorder 梯度边框模式。
tryReuseInputImage 如果可能,将输入图像的ROI放入金字塔中。 您可以传递false来强制复制数据。
demo调用, 源码
TEST(BuildOpticalFlowPyramid, demo)
{
std::string filename = GetOpenCVDatasetDirectory() + "/0002_dota2.avi";
BuildOpticalFlowPyramid demo;
demo.RunDemo(filename);
}
函数使用:
void BuildOpticalFlowPyramid::RunDemo(const std::string& filename)
{
cv::VideoCapture cap(filename);
if(!cap.isOpened()){
std::cerr << "cannot open camera\n";
}
cv::Mat frame,gray,grayPre,framePre,status,err;
const int maxLevel = 3;
std::vector<cv::Point2f> prevPts, nextPts;
std::vector<cv::Mat> pyramid1,pyramid2;
cap >> frame;
if(frame.empty()){
std::cerr << "grab first frame error.\n";
}
cv::cvtColor(frame,grayPre,cv::COLOR_BGR2GRAY);
cv::Size subPixWinSize(10,10);
cv::TermCriteria termcrit(cv::TermCriteria::COUNT|cv::TermCriteria::EPS,20,0.03);
while(cap.isOpened())
{
cap >> frame;
if(frame.empty()){
std::cerr << "cannot grab frame from camera.\n";
break;
}
cv::cvtColor(frame,gray,cv::COLOR_BGR2GRAY);
// 检测触点
goodFeaturesToTrack(gray, nextPts, 100, 0.01, 2.0);
cornerSubPix(gray, nextPts, subPixWinSize, cv::Size(-1,-1), termcrit);
goodFeaturesToTrack(grayPre, prevPts, 100, 0.01, 2.0);
cornerSubPix(gray, prevPts, subPixWinSize, cv::Size(-1,-1), termcrit);
// 构造流光金字塔
cv::buildOpticalFlowPyramid(gray, pyramid1, cv::Size(21,21), maxLevel);
cv::buildOpticalFlowPyramid(grayPre, pyramid2, cv::Size(21,21), maxLevel);
// 使用LK流光算法检测
cv::calcOpticalFlowPyrLK(pyramid1,pyramid2,prevPts,nextPts,status,err);
gray.copyTo(grayPre);
size_t i, k;
for( i = k = 0; i < nextPts.size(); i++ ){
cv::circle( frame, nextPts[i], 3, cv::Scalar(0,0,255), -1, 8);
}
// 显示图像
cv::imshow("frame",frame);
if(cv::waitKey(10) == 27){
break;
}
}
}
运行结果
[bin] ./xslam.opencv.video_analysis.build_optical_flow_pyramid_test
参考源码:
Note
build_optical_flow_pyramid_test.cpp
build_optical_flow_pyramid.cpp
build_optical_flow_pyramid.h